

Navigation method of pilotless automobile
A technology of unmanned vehicles and navigation methods, applied in the field of automatic control of vehicles, can solve the problems of limited component interactivity and reconfiguration, complex data exchange, and inflexibility, and achieve effective navigation control, strong scalability, and stability. good effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
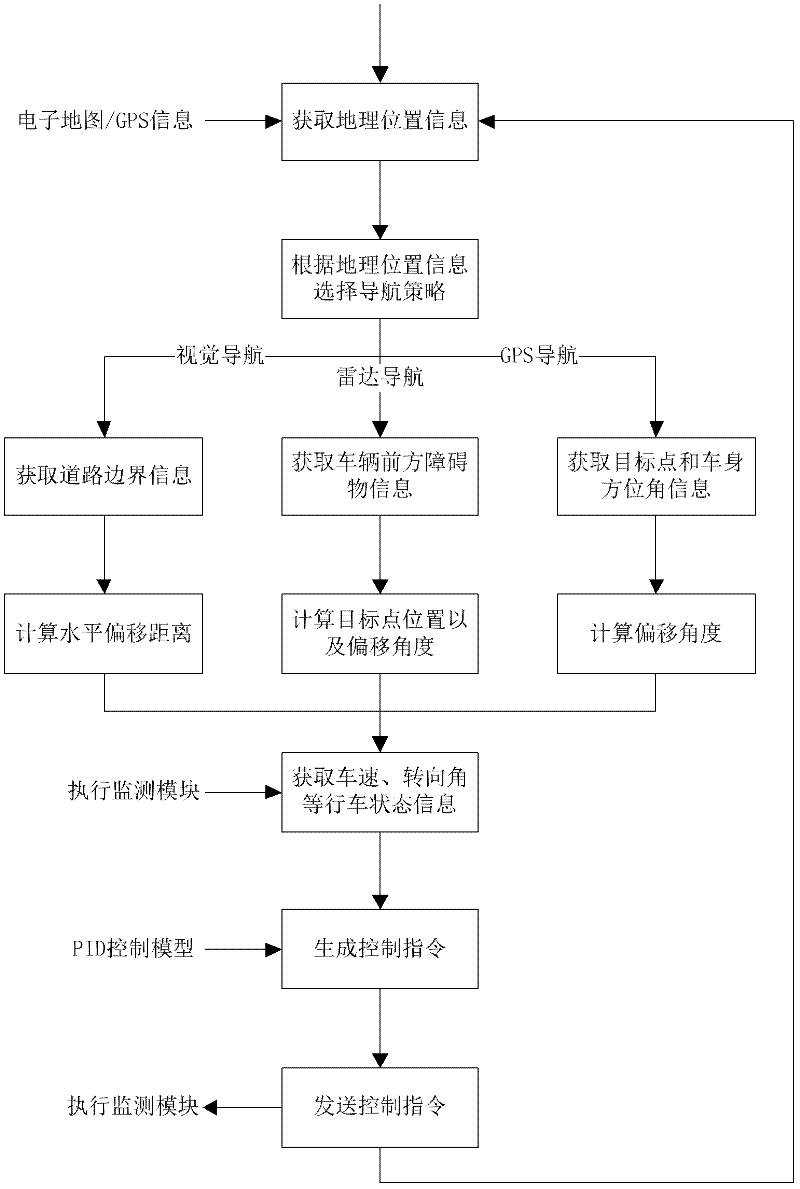
[0036] like figure 1 Shown, the navigation method of driverless car of the present invention, its steps are:
[0037] (1) Integrating three navigation strategies of visual navigation, radar navigation and GPS navigation;
[0038] (2) Calculate the current geographic location information of the vehicle based on the electronic map and GPS signal;
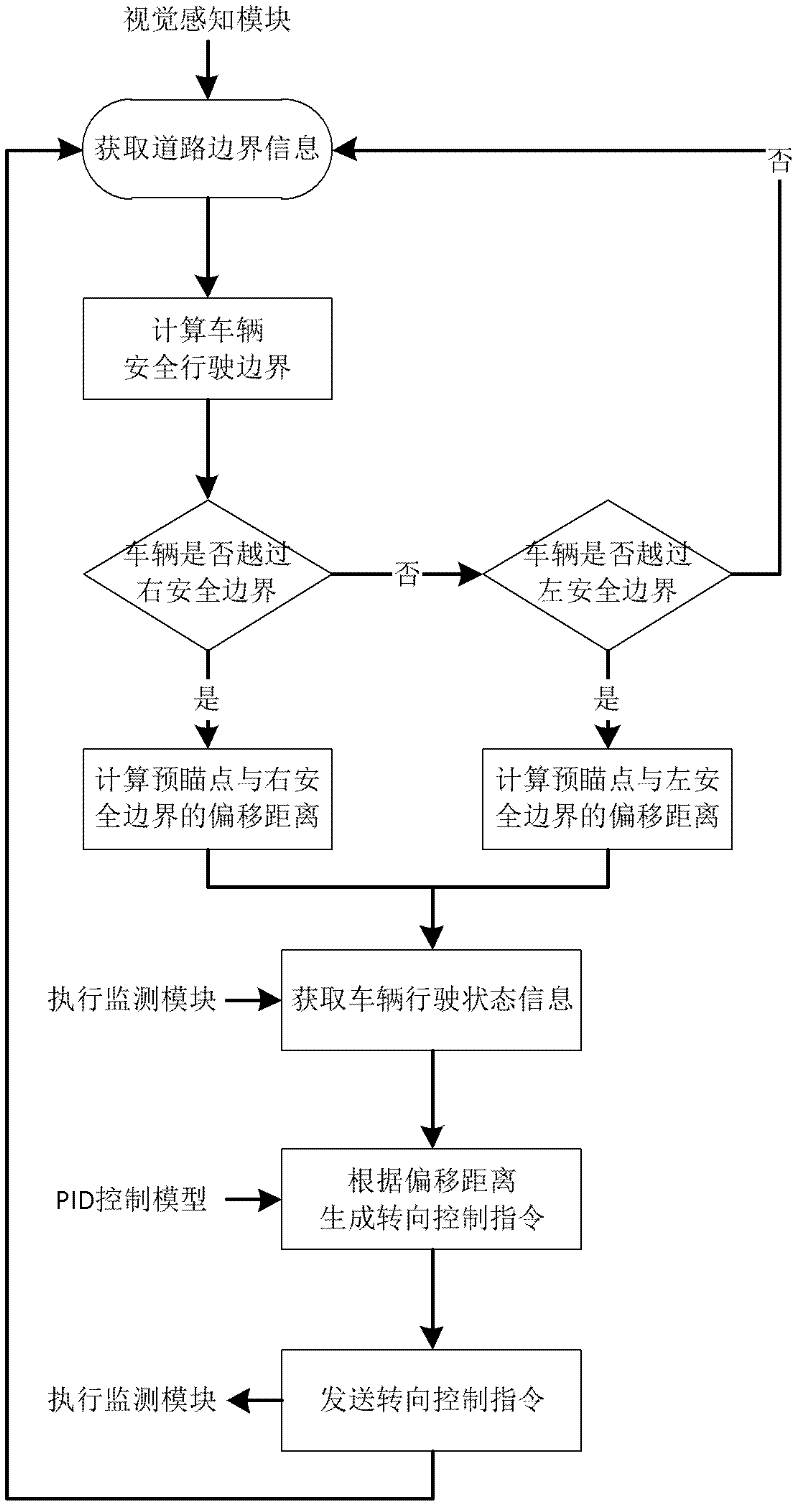
[0039] (3) Select the navigation strategy according to the current geographic location information of the vehicle: the visual navigation strategy has the highest priority. If the road boundary information perceived and recognized by the visual navigation module corresponding to the visual navigation strategy is inaccurate or unstable, radar navigation is preferred. strategy; if the obstacle information identified by the lidar detection module corresponding to the radar navigation strategy i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More