

Control portion for inverted vehicle
A technology of control device and moving body, applied in non-electric variable control, attitude control, control/adjustment system, etc., can solve the problems of swing and unable to stably maintain the target attitude, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 approach
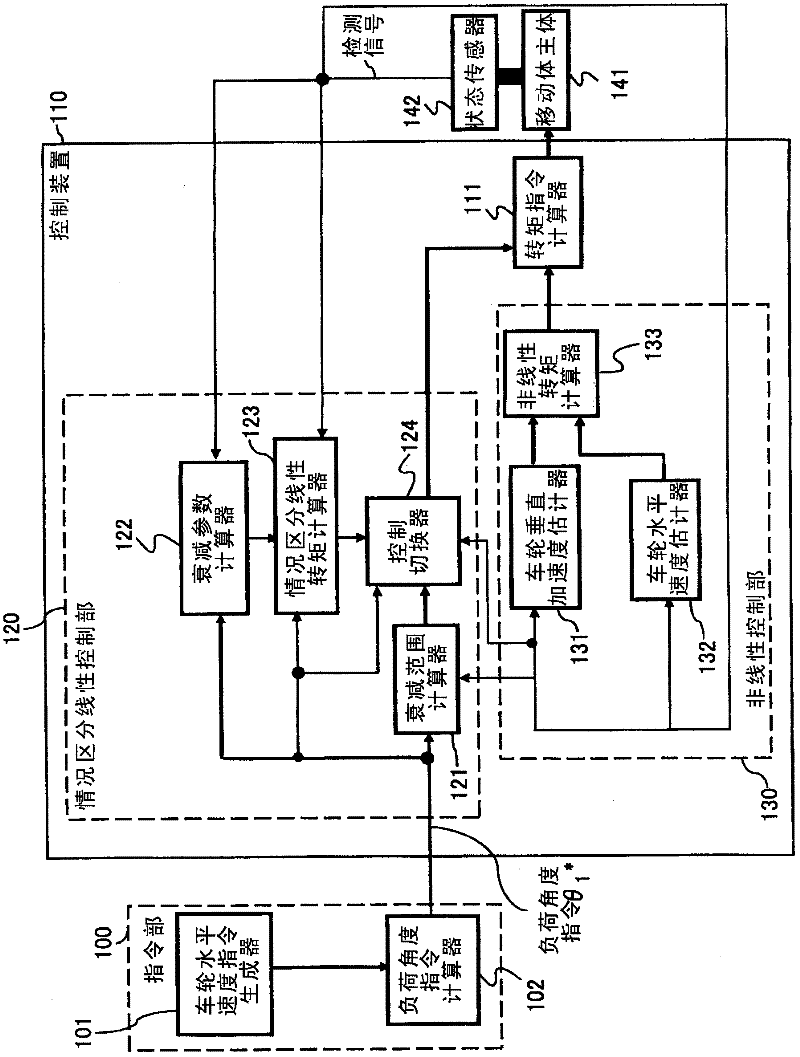
[0045] figure 1 It is a figure which shows 1st Embodiment concerning an inverted mobile body of this invention.
[0046] The inverted type mobile body includes: a mobile body main body 141 as a control object; a state sensor (sensors) 142, which detects the state of the mobile body main body 141; a command portion (reference portion) 100, which indicates a desired target state; and a control device 110 , which executes control of the moving body main body 141 based on a measurement signal detected by the state sensor 142 and an instruction value from the instruction unit 100 .
[0047] As the mobile body main body 141, a coaxial two-wheeled vehicle ( Figure 7 ), inverted autonomous driving robot ( Figure 8 ) and other general examples.
[0048]The present invention is not limited thereto, and any mobile body may be any vehicle as long as it includes a wheel-based drive unit and a rod-shaped load body, and performs balance control to turn the rod-shaped load body upside d...
experiment example
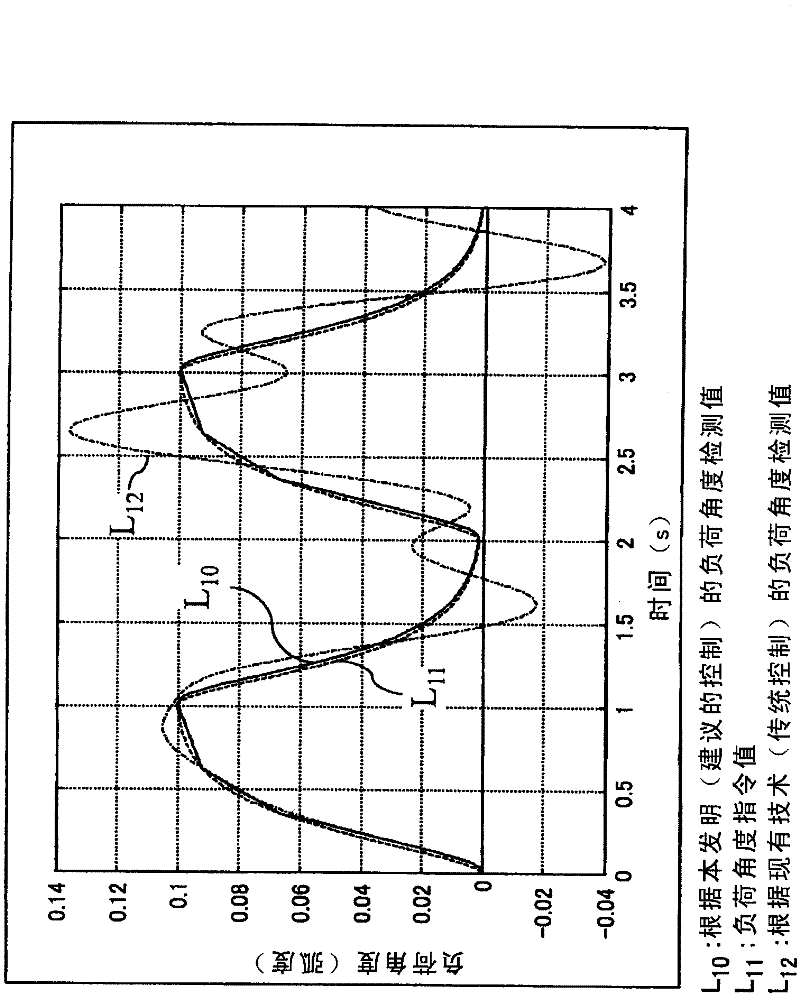
[0214] Next, experimental examples for demonstrating the effects of the present invention are shown.
[0215] As an experimental example, simulation results of the first embodiment are shown.
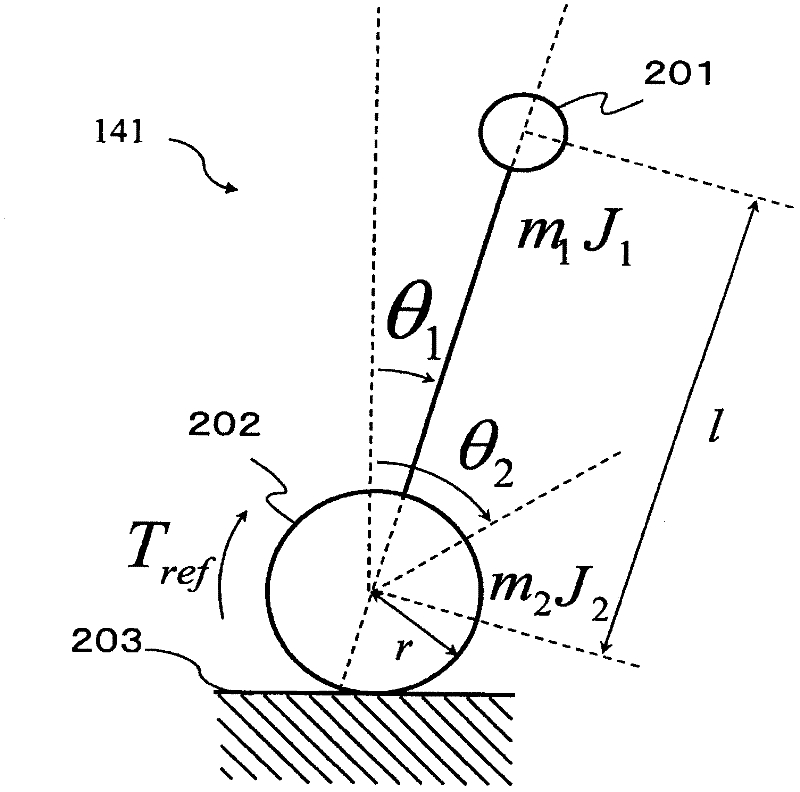
[0216] Here, numerical values used for simulation are as follows.
[0217] m 1 =70[kg],
[0218] J 1 =25.2[kg·m 2 ],
[0219] m 2 =15[kg],
[0220] J 2 =0.075[kg·m 2 ],
[0221] I=0.9[m],
[0222] r=0.1[m],
[0223] D=0.1[N·s / m],
[0224] g=9.8[m / s 2 ],
[0225] T=1×10 -3 [s],
[0226] κ=40[s -1 ],
[0227] J 10 = m 1 × I 2 +J 1 [kg·m 2 ],
[0228] beta 0 =2πκ[s -1 ],
[0229] β=β 0 ×J 10 [N·m·s / rad],
[0230] γ=0.1[N·m·s / rad],
[0231] pcl=[-49.9, -201.4][rad / s],
[0232] td=0.5[s]
[0233] in,
[0234] m 1 is the load mass,
[0235] J 1 is the load moment of inertia,
[0236] m 2 is the wheel mass,
[0237] J 2 is the moment of inertia of the wheel,
[0238] I is the distance between the centers of gravity of the loaded wheels,
[0239] r i...
Deformed example 1
[0264] In the above-mentioned first embodiment, the attenuation parameter γ is a value calculated by the attenuation parameter calculator 122 according to the above formula (20), but the attenuation parameter γ may also be a preset fixed value.
[0265] That is, if Figure 5 As shown, it is also possible to store the preset damping parameter setting in the damping parameter memory 125, and provide the value of the damping parameter γ from the damping parameter memory 125 to the situation-distinguishing linear torque calculator 123 .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More