

Rowing motion compensation method for fiber optic gyroscope trapdown inertial navigation
A fiber optic gyroscope and motion compensation technology, applied in the field of inertial navigation, can solve problems such as loss of precision, achieve the effect of avoiding loss of precision and improving system performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
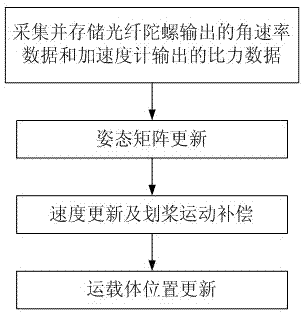
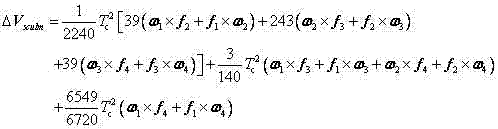
[0017] Paddle motion in inertial navigation refers to the combined motion of equal-frequency linear oscillations and angular oscillations on orthogonal axes. If the rapid attitude changes that occur between consecutive specific force decompositions are not considered, it will cause acceleration zero bias on the third axis, which will bring navigation errors and reduce navigation accuracy. Therefore, paddle motion compensation is required. The paddling effect compensation term is
[0018] ;
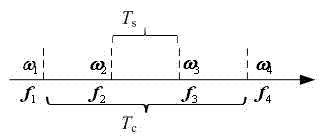
[0019] Since the output of the fiber optic gyroscope and the accelerometer is the angular rate signal and the specific force signal, it is impossible to directly apply the above formula to calculate the compensation item of paddling motion. The angular velocity and specific force changes of the carrier are fitted with a cubic parabola segmentally, and the paddling effect compensation term is converted into the expression form of angular velocity and specific force, which can improve the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More