Leg of multi-legged walking robot
A walking robot and robot foot technology, applied in the field of robotics, can solve problems such as limiting the range of movement of robot feet, complex structure of flat-bottomed feet, and tripping, and achieve the goals of improving measurement range and accuracy, flexible and reliable walking, and reducing costs Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be further described below in conjunction with accompanying drawing.
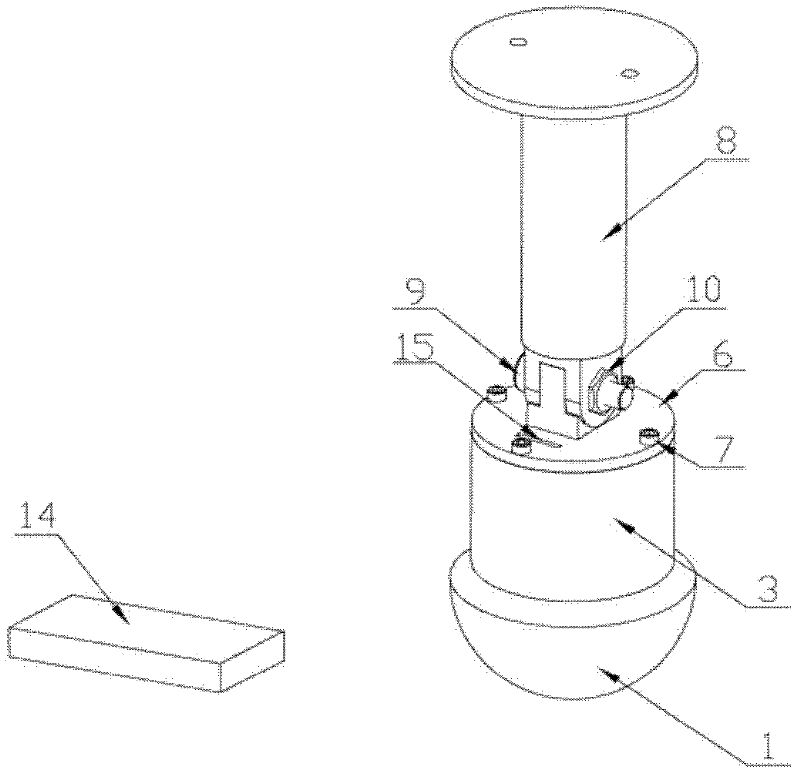
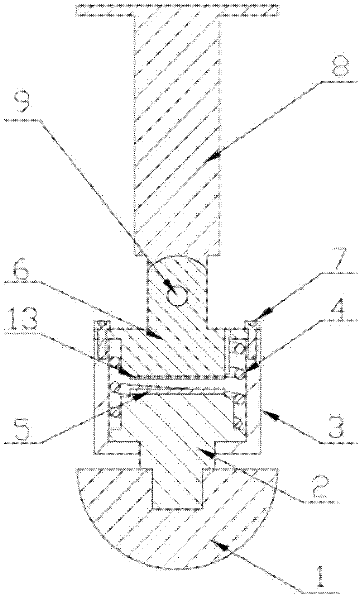
[0020] Such as figure 1 , figure 2 As shown, the present invention adopts a spherical foot-end type foot structure, which is composed of a multi-legged walking robot foot mechanical device and a multi-legged walking robot foot force measuring device.
[0021] The multi-leg walking robot foot mechanical device includes a spherical foot end 1, a shock-absorbing force-measuring part and a calf foot connecting piece 8. Spherical foot end 1 is made of rubber material, and this kind of foot end is flexible contact rather than rigid contact between the ground after landing, which can increase the friction between the feet of the multi-legged walking robot and the ground to prevent the multi-legged walking robot from When walking, slipping can form a buffer with the ground to reduce the impact, which can effectively improve the adaptability of the multi-legged walking robot to t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More