High-precision real-time stereoscopic visual positioning method utilizing parallax space bundle adjustment
A technology of cluster adjustment and stereo vision, which is applied in stereo systems, using re-radiation, electrical components, etc., can solve problems such as slow convergence speed, convergence divergence, low numerical stability, and large dependence on initial values
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
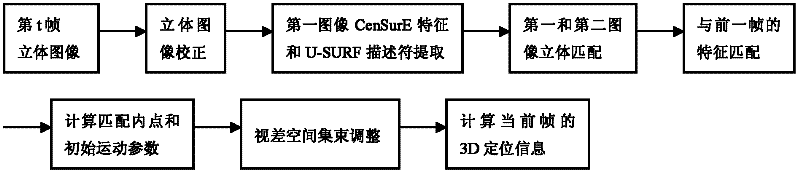
[0058] In order to make the technical solutions and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings. The overall flow chart of the present invention is as figure 1 shown. As described in the flowchart, the steps are as follows:
[0059] 1. Stereo image correction:
[0060] The first frame of the video stream is selected as the starting frame; the video stream is formed by the camera of the stereo camera; using the parameters (internal reference, external reference, and distortion parameters) of the calibrated stereo camera, the epipolar line correction method is used to correct the stereo image pair, The feature points corresponding to the left and right images are located on the same horizontal scanning line, and the corrected stereo camera baseline length B and focal length f are obtained at the same time. The epipolar correction method adopts the Bouguet algorithm. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com