

Position reversal solution control method of six-freedom cascade mechanical arm
A control method and technology of a mechanical arm, applied in the direction of position/direction control, non-electric variable control, control/regulation system, etc., can solve the problems of poor real-time performance and low accuracy, and meet the requirements of real-time performance, accuracy, and calculation amount Small, easy-to-achieve effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
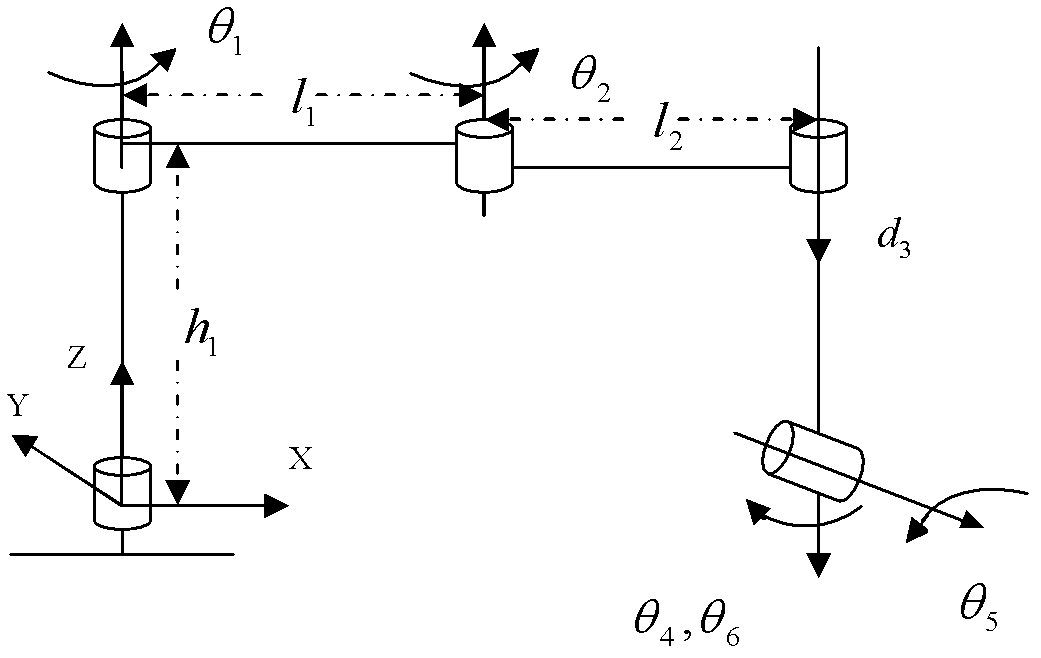
[0029] The present invention will be further described below with reference to the accompanying drawings.
[0030] refer to figure 1 , a position inverse solution control method of a six-degree-of-freedom mechanical arm in series, characterized in that: the dual quaternion can be used to represent the nature of the rotation and translation of a three-dimensional object, and each rotating joint of the six-degree-of-freedom mechanical arm is transformed by a dual quaternion Numbers show that in three-dimensional space, around the unit vector u=(u x , u y , u z ) rotation by angle θ can be represented by a unit quaternion as:
[0031] cos(θ / 2)+sin(θ / 2)(u x i+u y j+u z k)
[0032] which is
[0033] q=[cos(θ / 2), sin(θ / 2)x , u y , u z >] (1)
[0034] The unit quaternion can describe the rotation of a rigid body as shown in formula (2), and a displacement in three-dimensional space can be synthesized by rotation and translation, and the rotation is represented by the unit ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More