

Position reversal solution control method of six-freedom cascade mechanical arm
A control method and a technology of a robotic arm, applied in the direction of position/direction control, non-electric variable control, control/adjustment system, etc., can solve problems such as low accuracy and poor real-time performance, and achieve small calculations and satisfy real-time performance Accuracy, practical effect of the method
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
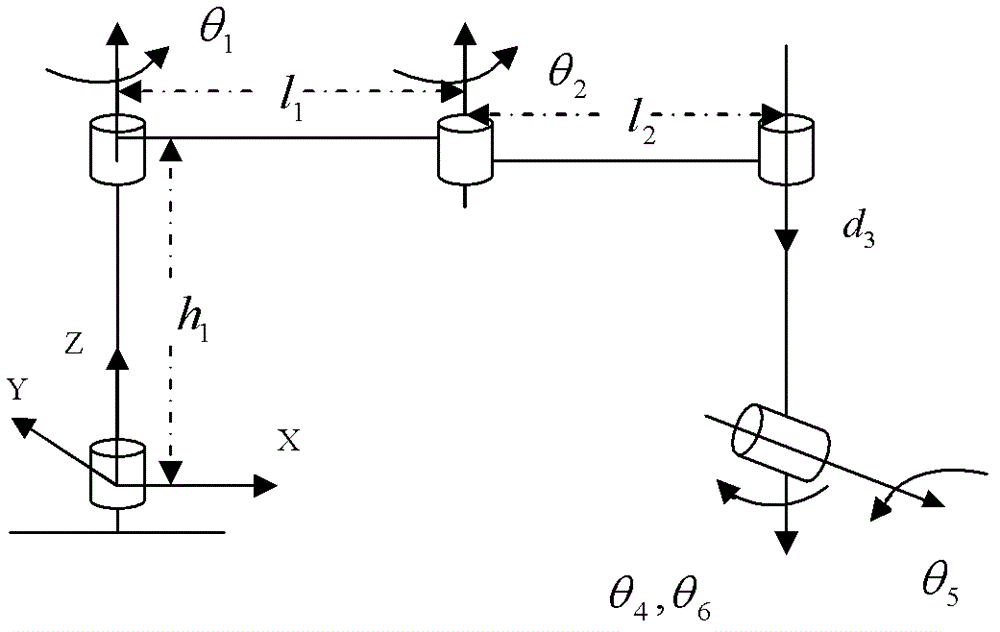
[0029] The present invention will be further described below with reference to the drawings.
[0030] Reference figure 1 , A six-degree-of-freedom tandem manipulator's position inverse solution control method, which is characterized in that dual quaternions can be used to express the properties of rotation and translation of three-dimensional objects. Each rotation joint of the six-degree-of-freedom manipulator is converted by a dual quaternion. In three-dimensional space, the unit vector u = (u x , U y , U z ) The rotation of the angle θ can be expressed as a unit quaternion:
[0031] cos(θ / 2)+sin(θ / 2)(u x i+u y j+u z k)
[0032] which is
[0033] q=[cos(θ / 2), sin(θ / 2) x , U y , U z > ] (1)
[0034] The unit quaternion can describe the rotation of a rigid body as shown in formula (2). A displacement in the three-dimensional space can be synthesized by rotation and translation. The unit quaternion q represents rotation, p=(p x , P y , P z ) Represents the translation vector, then e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More