

Aligning and driving device and method for steering wheel
A driving method and a technology of a driving device, which are applied to simulators of space navigation conditions, transportation and packaging, instruments, etc., can solve the problems of low control precision, high cost of use, complex structure, etc., and achieve high control precision and good stability , easy-to-achieve effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
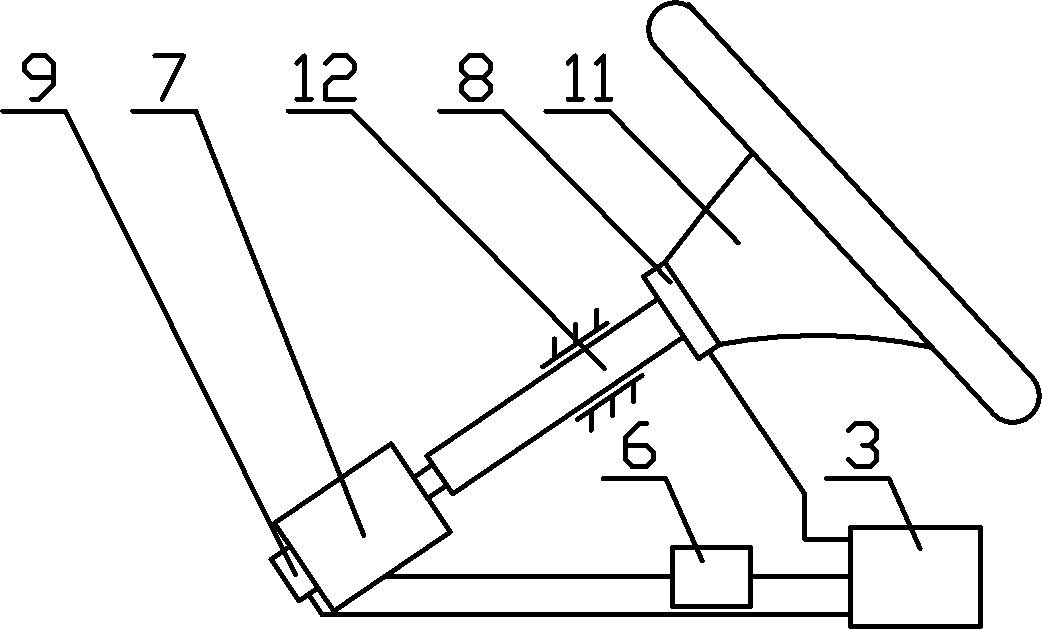
[0022] Such as figure 1 The steering wheel return and driving device shown include a steering wheel 11, a shaft 12 fixedly connected to the steering wheel 11, and a single-chip microcomputer 3. A torque sensor 8 is installed on the shaft 12 at the bottom of the steering wheel 11, and a stepper motor 7 is connected to the end of the shaft 12. And encoder 9, torque sensor 8 and encoder 9 are all connected with single-chip microcomputer 3, stepper motor 7 is connected with single-chip microcomputer 3 through driver chip 6, single-chip microcomputer 3 is connected with communication chip 2, and communication chip 2 is connected with upper computer 13 through communication interface 1 .
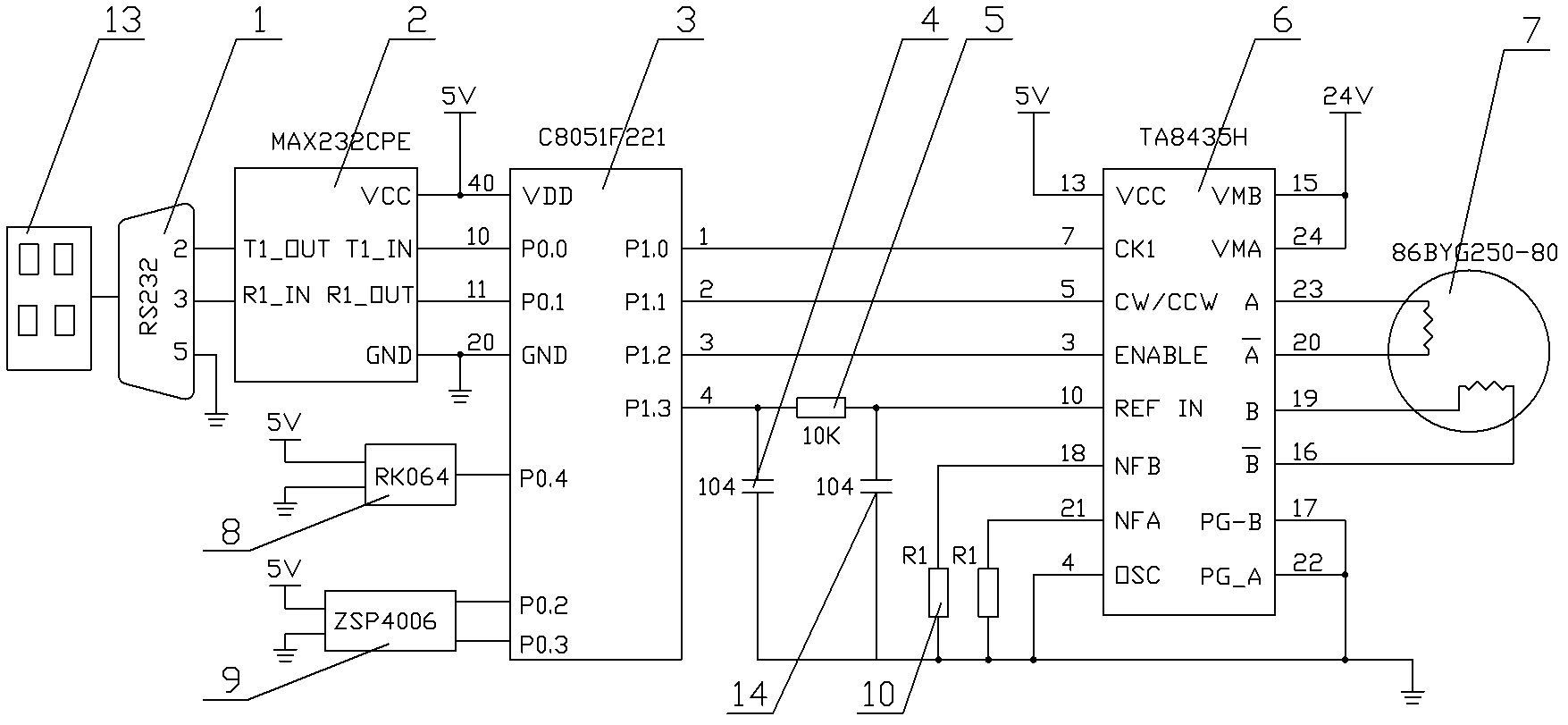
[0023] refer to figure 2 In the schematic circuit diagram shown, the communication chip 2 is connected to the host computer 13 of the steering wheel simulator th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More