Grape bagging robot system based on machine vision
A robot system and machine vision technology, applied in manipulators, program-controlled manipulators, plant protection covers, etc., can solve problems such as low work efficiency and high labor intensity, and achieve the effect of reducing labor intensity and improving work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be further described below in conjunction with the accompanying drawings.
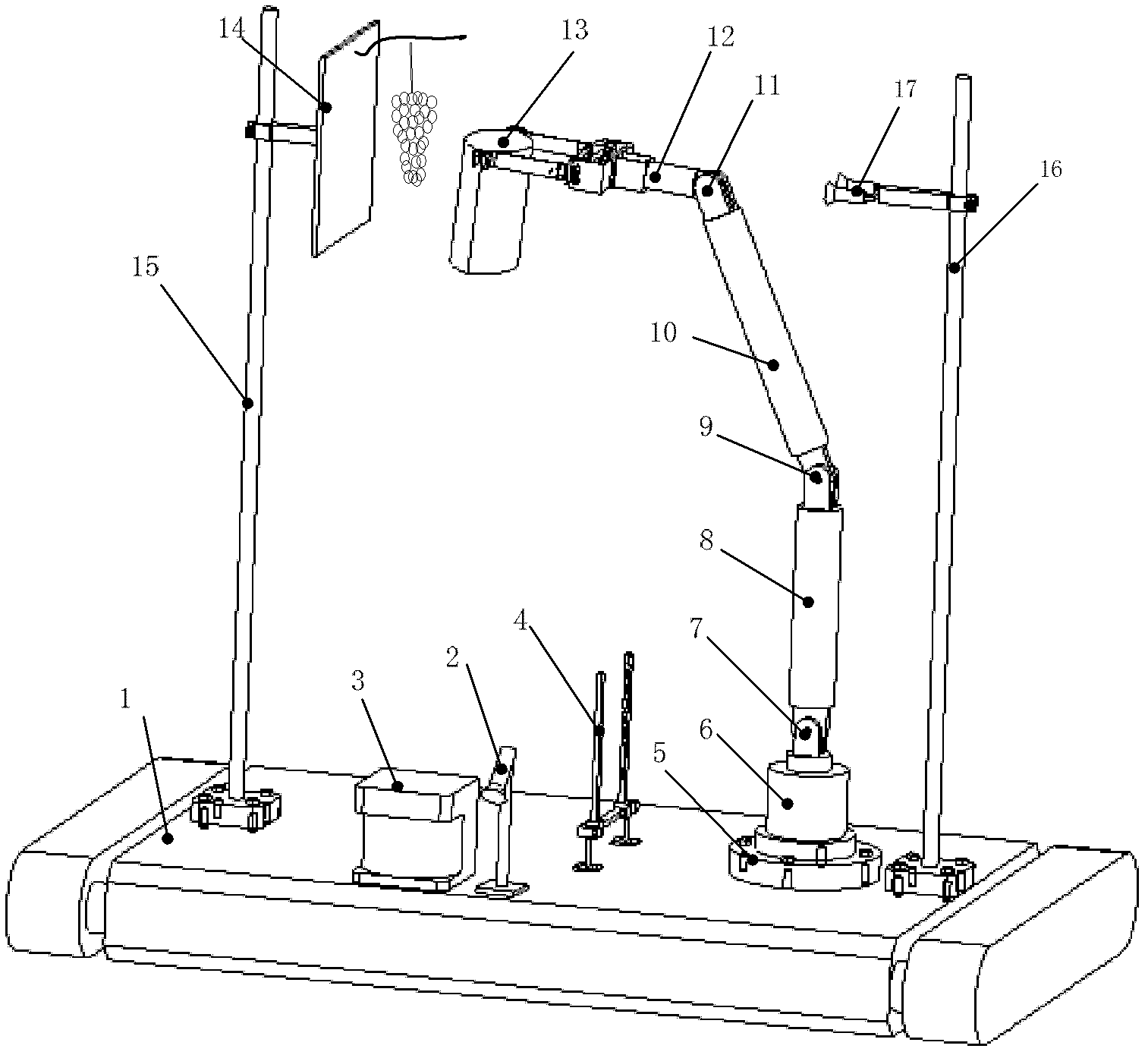
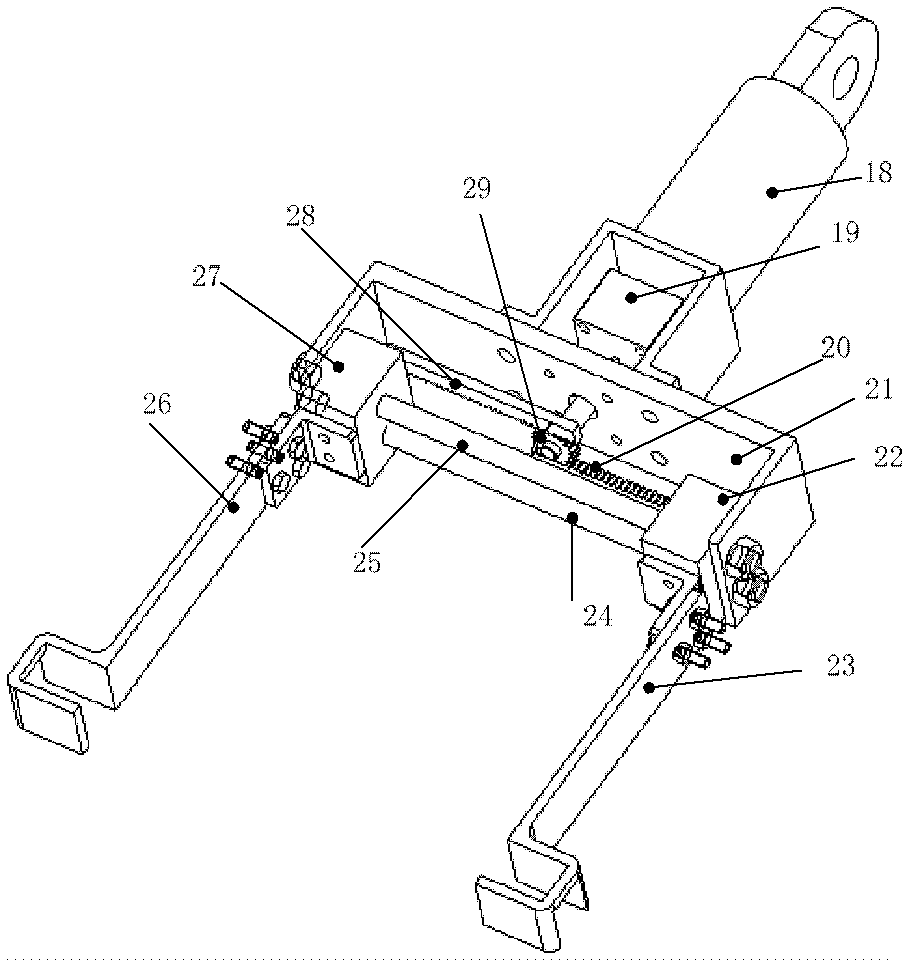
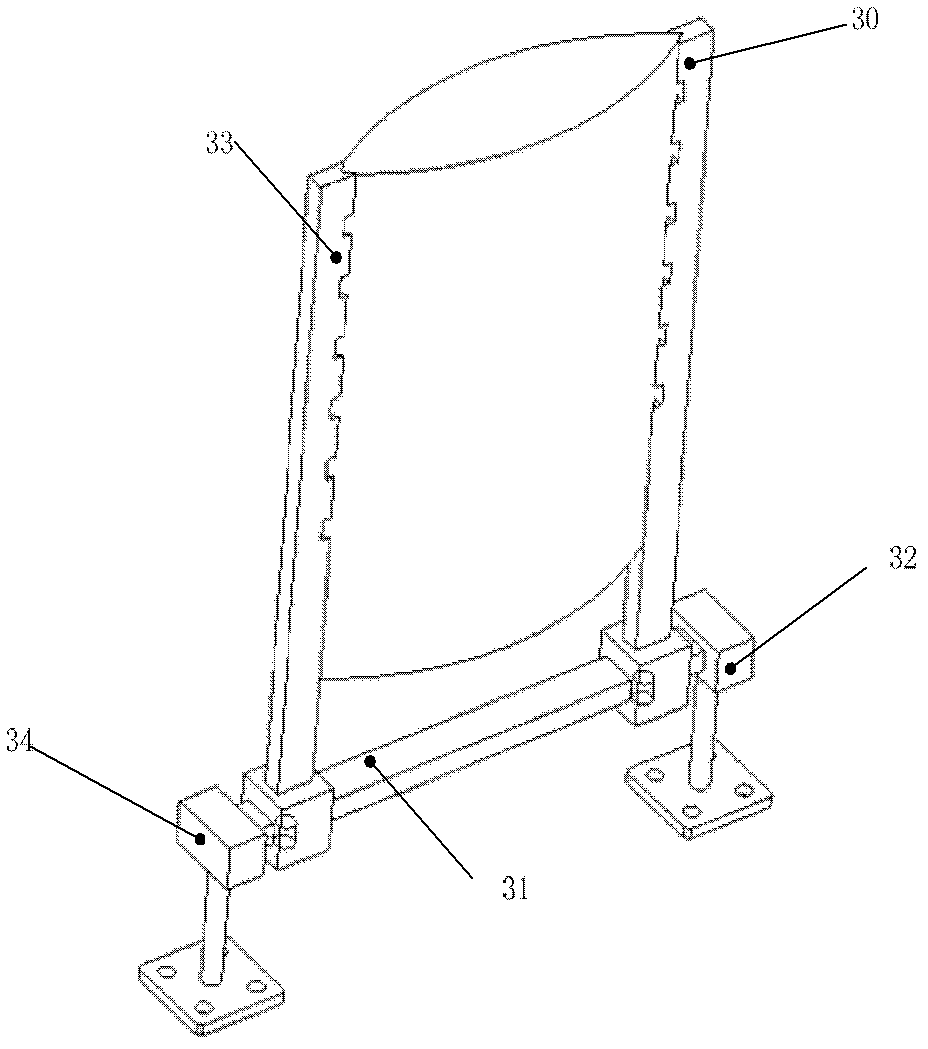
[0032] refer to Figure 1 to Figure 9 , a grape bagging robot based on machine vision, the grape planting mode applicable to this robot is as follows:
[0033] Selecting the appropriate planting pattern of grapes can provide a more effective identification of the target object for the robot. For grapes cultivated on horizontal trellises, the fruit droops are distributed in a plane parallel to the ground, and there are relatively few obstacles around them. At the same time, horizontal trellis cultivation has a wider row spacing, which is very conducive to the use of machine vision grape bagging robots for bagging operations.
[0034] The use of horizontal trellis cultivation can not only improve the ventilation and light transmission performance of the vineyard, reduce the occurrence of diseases caused by humidity in summer, but also allow flexible pruning. According...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com