

Brick setting robot gripper
A technology of robot and brick stacking, which is applied in the field of gripping hands of the brick stacking robot, can solve the problems of easily damaged bricks, affecting brick-making production efficiency, and long shrinkage time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
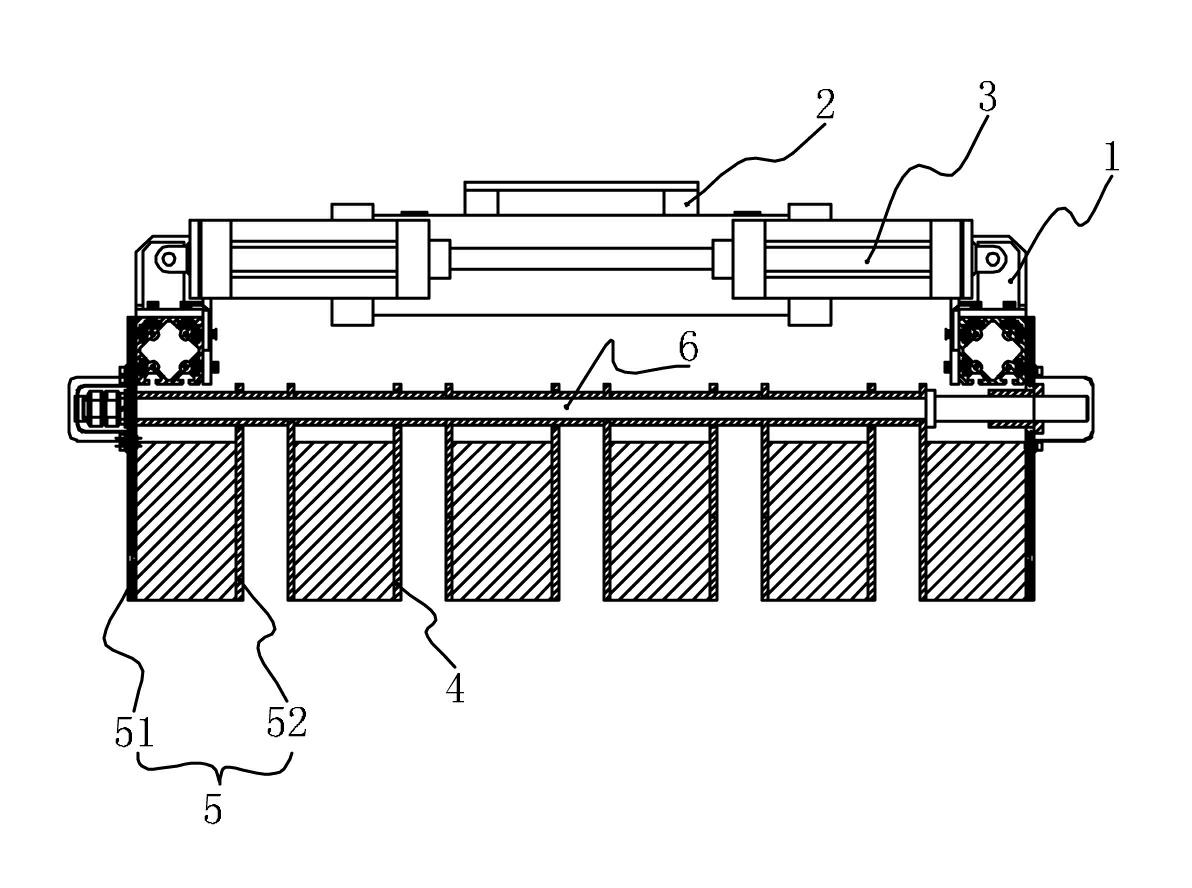
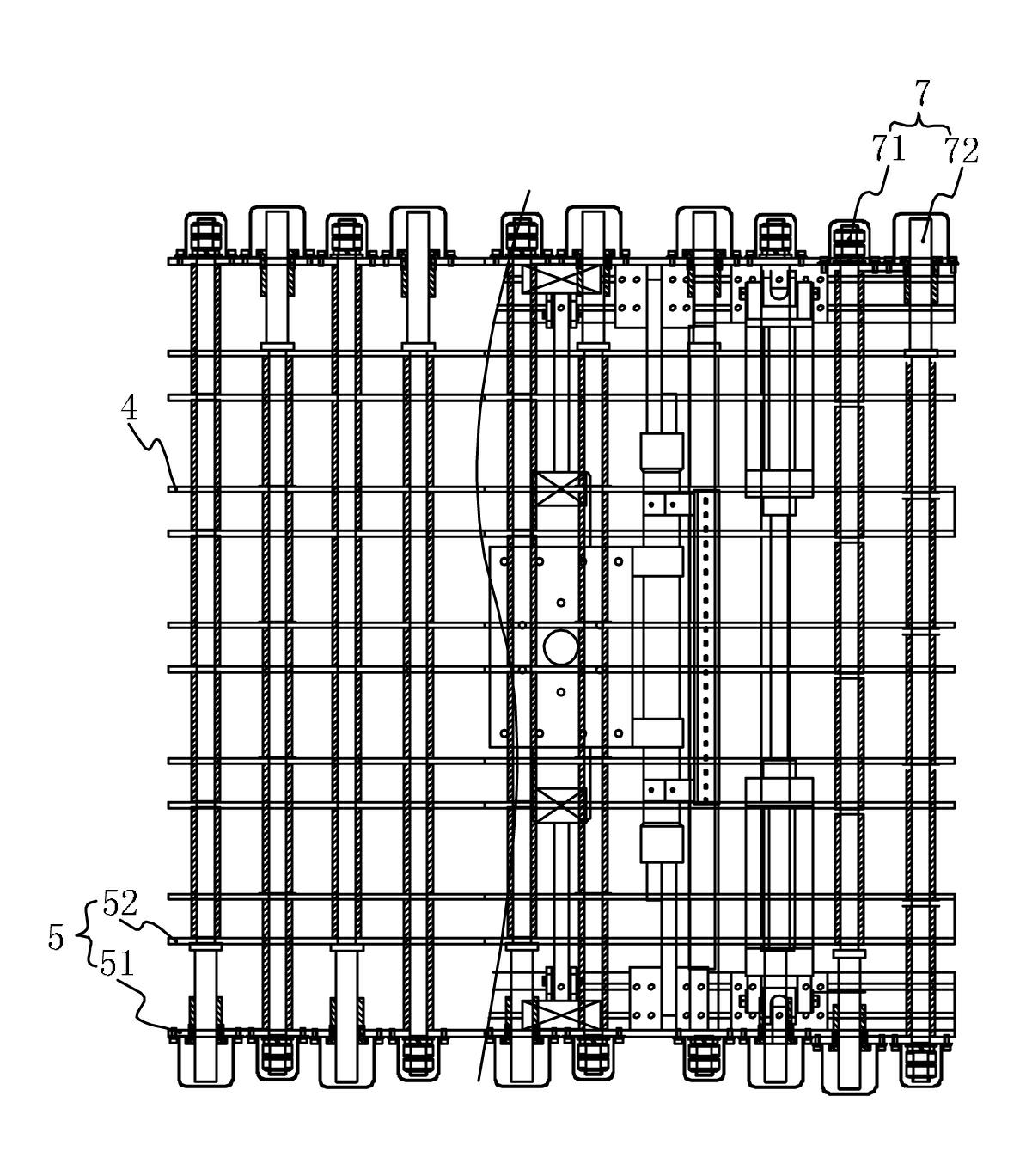
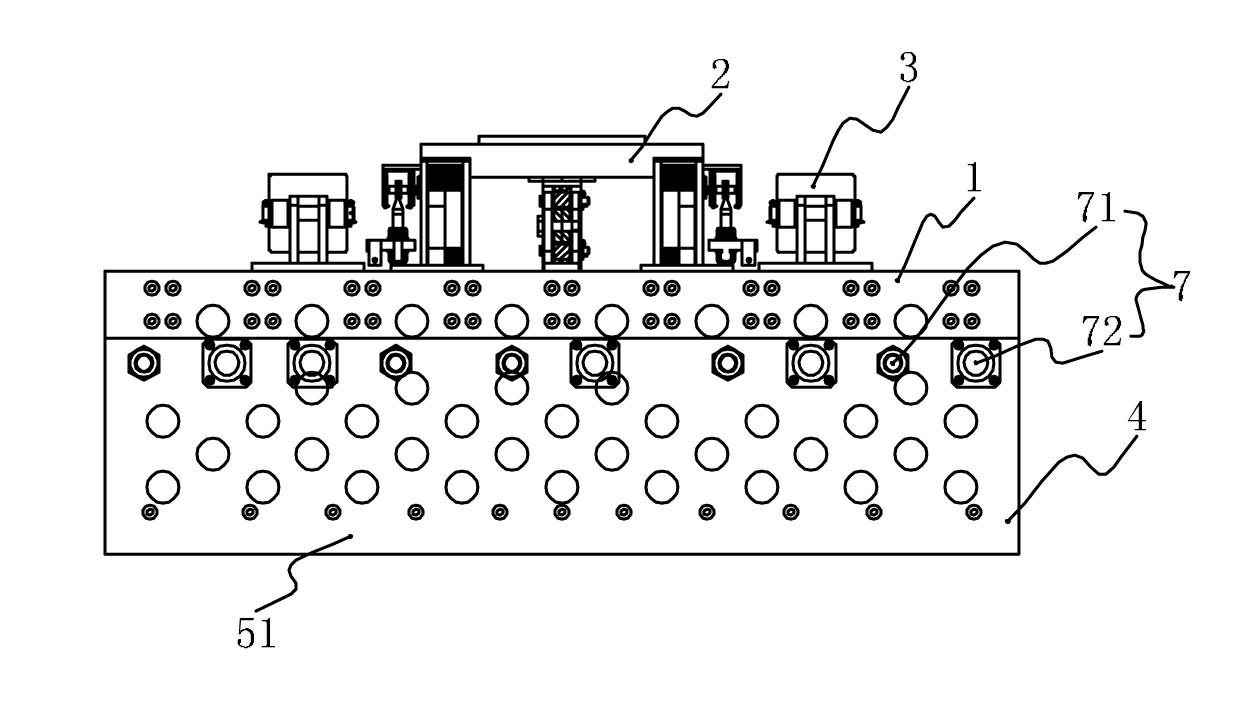
[0013] Such as figure 1 , 2 and image 3 As shown, the gripper of the brick-coding robot of the present invention includes a top frame body 1 on which a mounting base 2 and a pneumatic device 3 are fixed through guide rails, and a machine gripper is connected to the bottom of the top frame body 1 . The machine gripper includes an even number of splints 4, the splints 4 are parallel to each other and vertically arranged, every two adjacent splints 4 form a splint group 5, and each splint group is composed of a left splint 51 and a right splint 52 . There are pull rods 6 transversely running through the gripper of the machine, and every two groups of the pull rods 6 form four groups of drive pull rods 7, and the drive pull rods 7 include a left drive pull rod 71 and a right drive pull rod 72, and the left drive pull rod 71 is fixed with the left splint 51 of each splint group 5, and cooperates with the right splint 52 of each splint group in clearance; Cooperate.
[0014] T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More