

Multi-resolution path planning method for micro unmanned aerial vehicle under influence of wind field
An unmanned aerial vehicle, multi-resolution technology, applied in the field of multi-resolution path planning of micro unmanned aerial vehicles, can solve the problems of limited sensor performance and easy to be affected by wind field, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
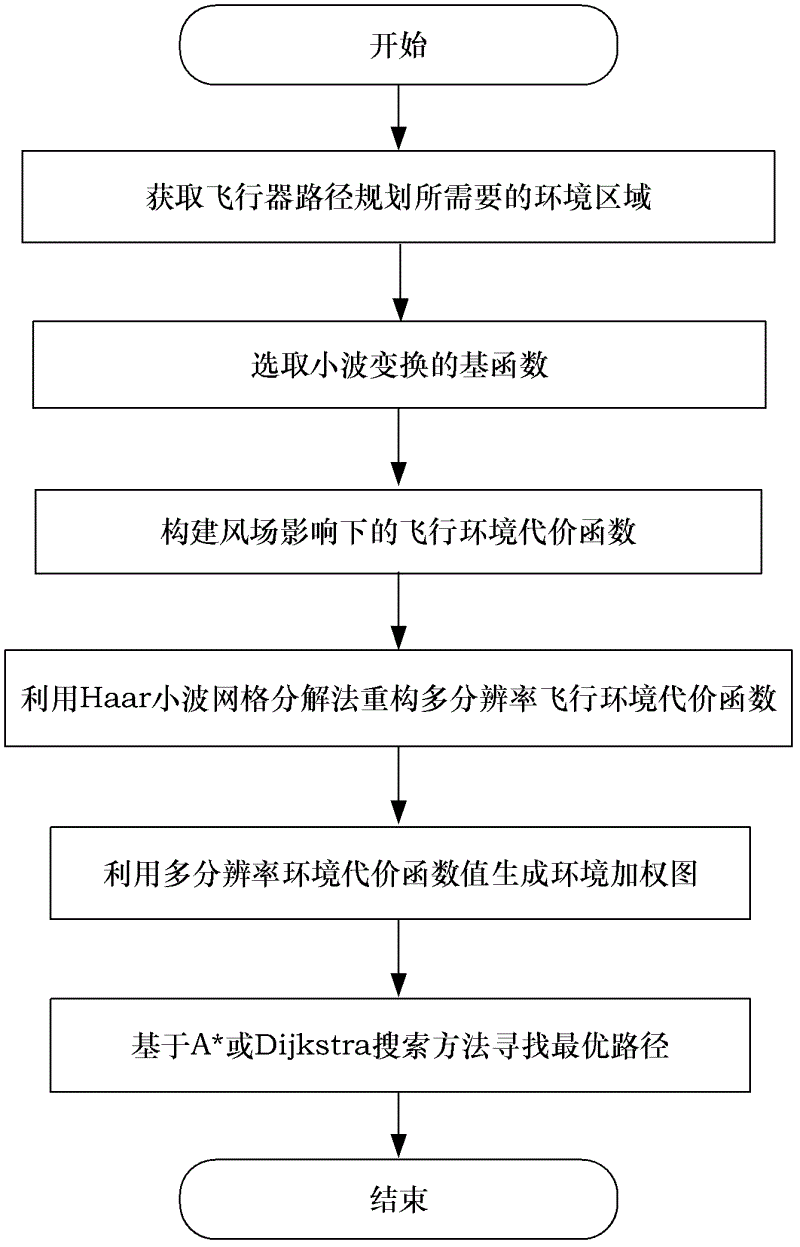
[0050] The method of the present invention will be specifically described below in conjunction with the accompanying drawings and embodiments.
[0051] The main idea of the method of the present invention is: on the premise that the path environment model representation meets a certain degree of fidelity and accuracy, according to the computing power of the airborne computer, the performance of the airborne sensor and the detailed information of the environment, the model representation of different levels of detail is used for the environmental area, Reduce the complexity and calculation amount of the environment model, and achieve a compromise between the complexity, fidelity, accuracy and calculation efficiency of the environment model representation. By using the Haar wavelet function to perform multi-resolution representation of the environmental information on the path of the aircraft, the environmental space is divided into a series of nested subspaces to automatically...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More