

Front vehicle ranging method based on monocular vision
A distance measurement method and monocular vision technology, which is applied in the directions of line-of-sight measurement, distance measurement, photogrammetry/video measurement, etc., and can solve the problems that cannot meet the needs, do not consider optical path errors such as lens distortion, and reduce the accuracy of distance measurement. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
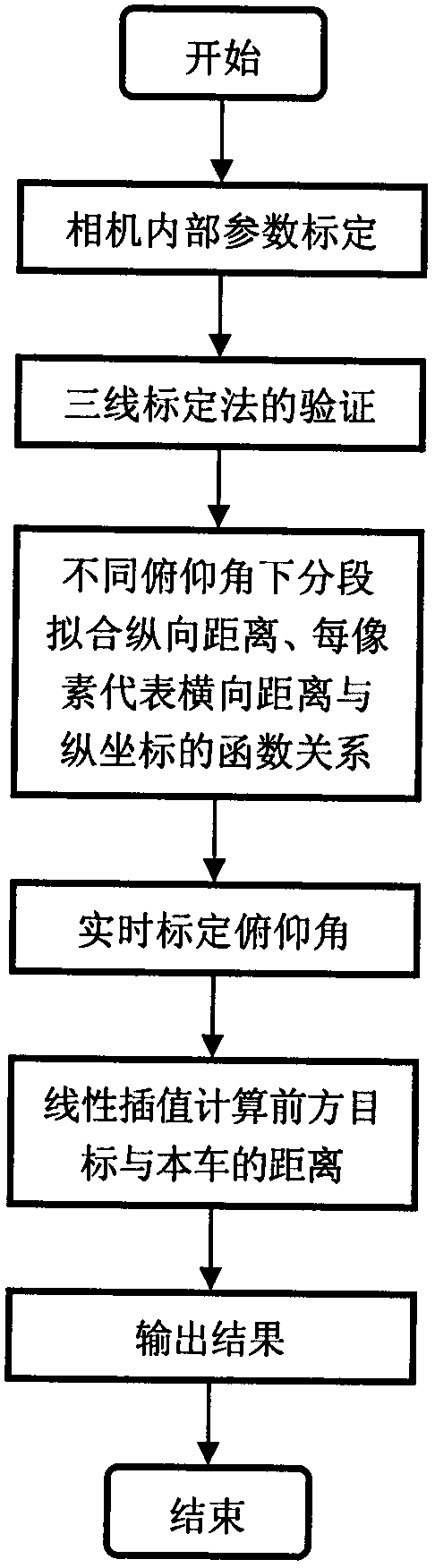
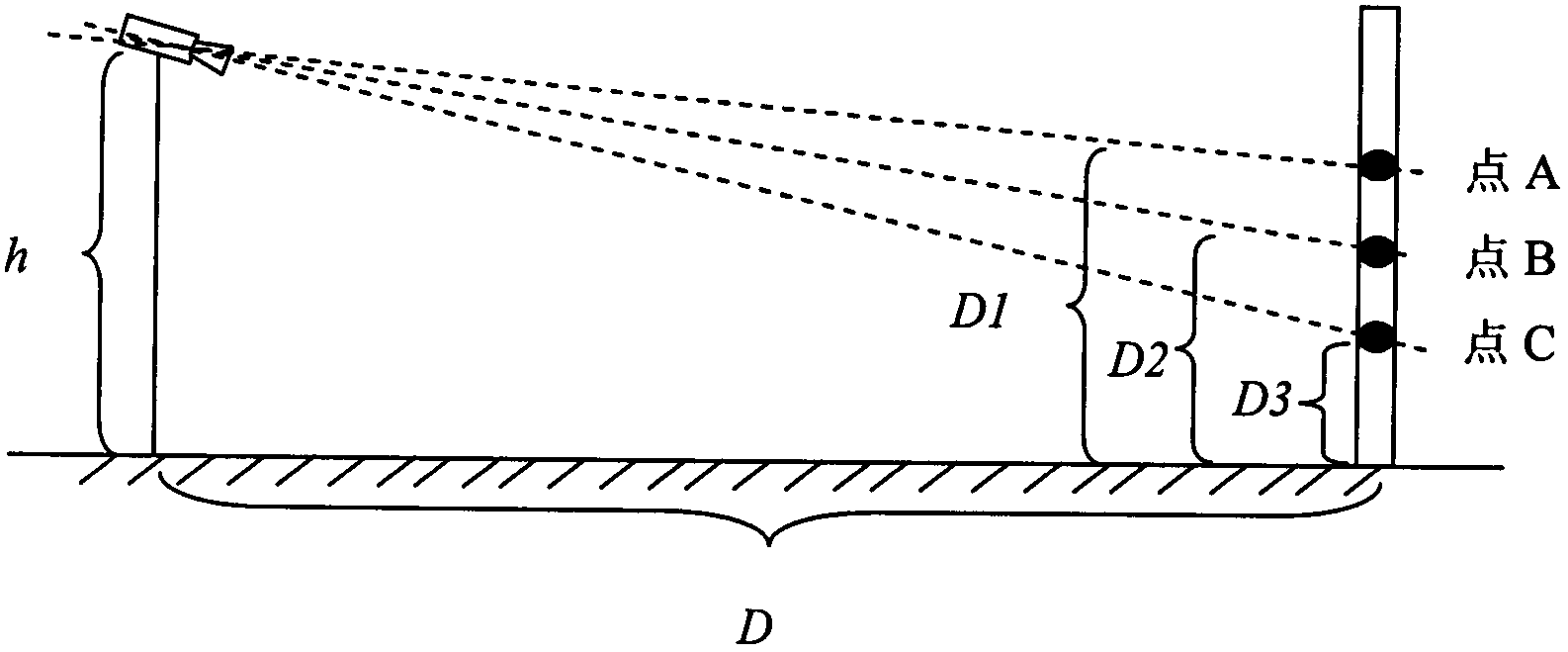
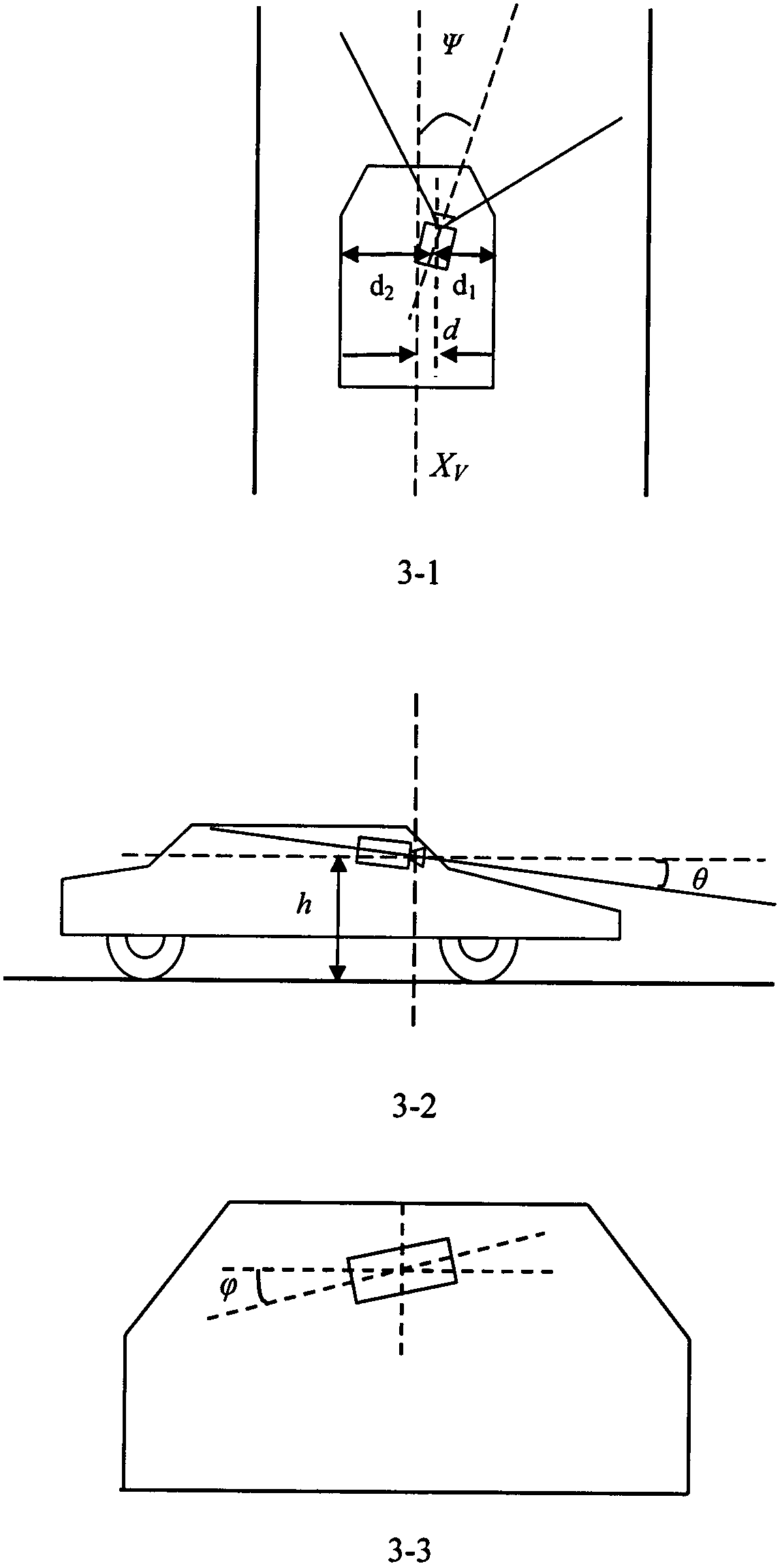
[0032] The flow chart of the present invention is as figure 1 As shown, the internal parameters of the camera are calibrated first, and the accuracy of the three-line calibration method is verified by geometric calculation and total station measurement, and then the attitude parameters of the camera are statically calibrated by the three-line calibration method. According to different pitch angles of the camera, the segmented The method of fitting function, fitting the functional relationship between the vertical coordinate and the actual vertical distance, and fitting the functional relationship between the vertical coordinate and the actual horizontal distance represented by each pixel. Finally, using the results of lane line detection, the actual pitch angle of the camera is calculated in real time by using the three-line calibration method again, and the distance between the vehicle target and the vehicle is calculated by linear interpolation. The specific implementation p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More