

Bionic manipulator
A kind of robotic and fuselage technology, which is used in the field of bionic robotics, can solve problems such as manual feeding, affecting production efficiency, etc., and achieve the effect of reducing labor intensity, convenient control, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
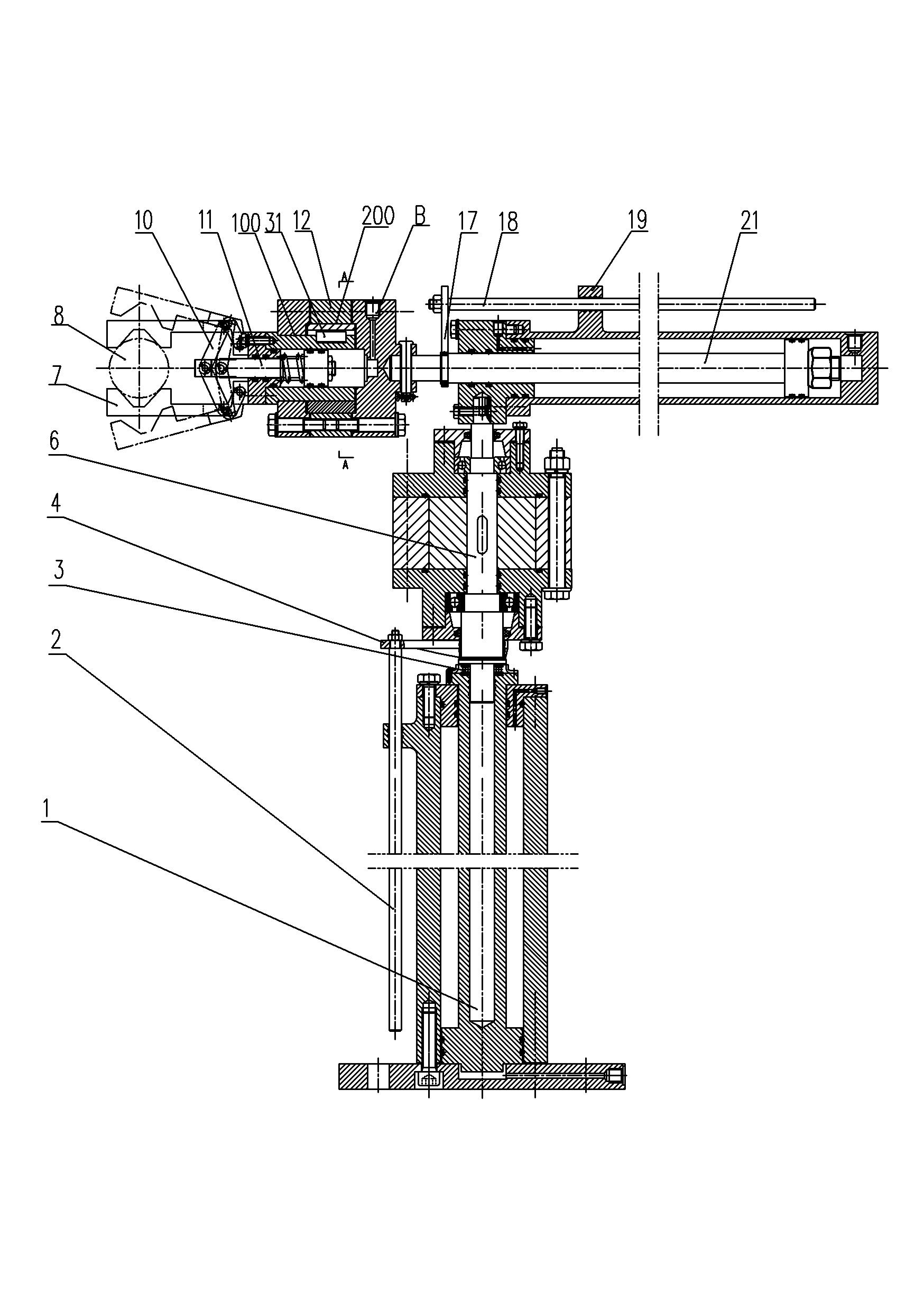
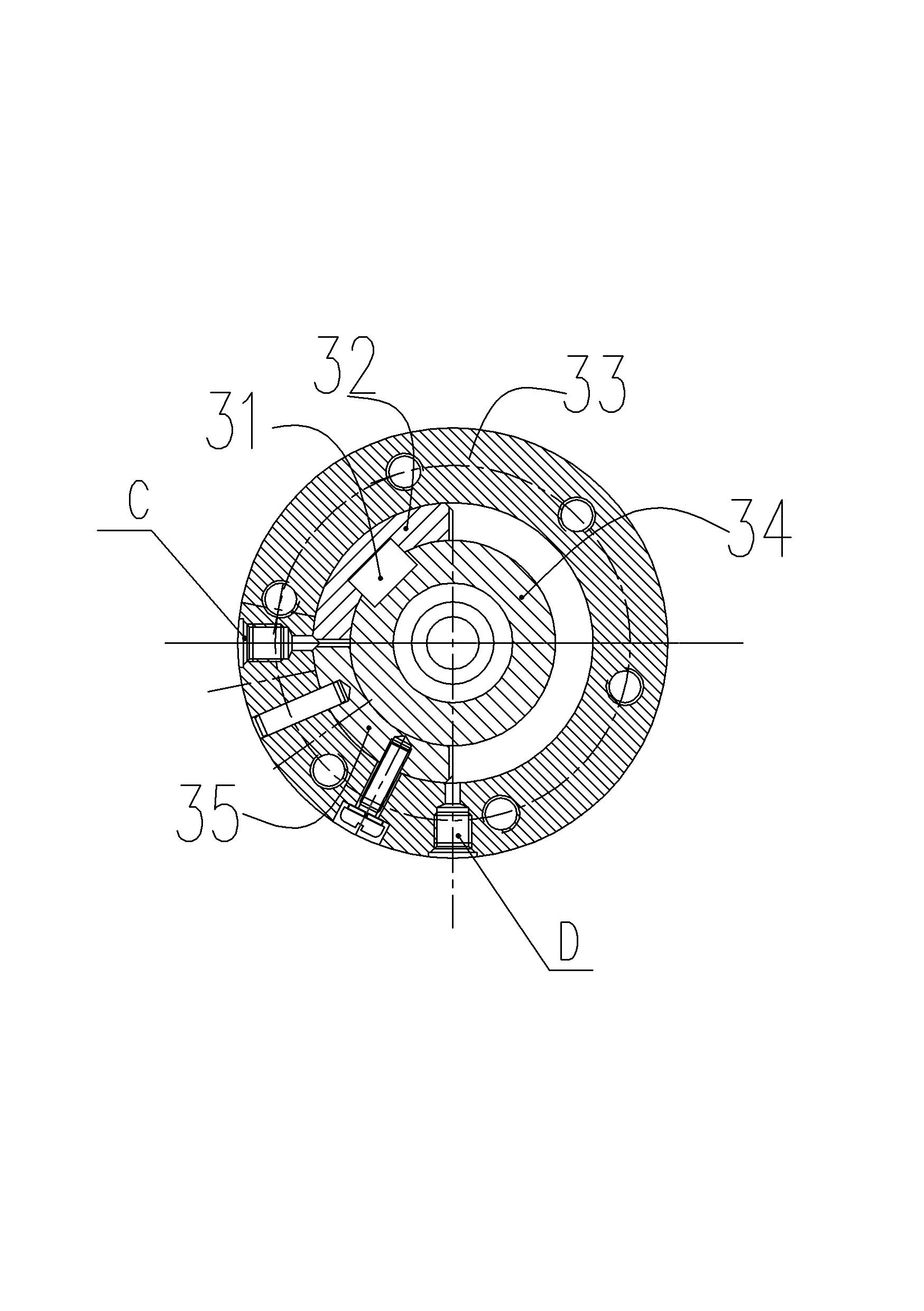
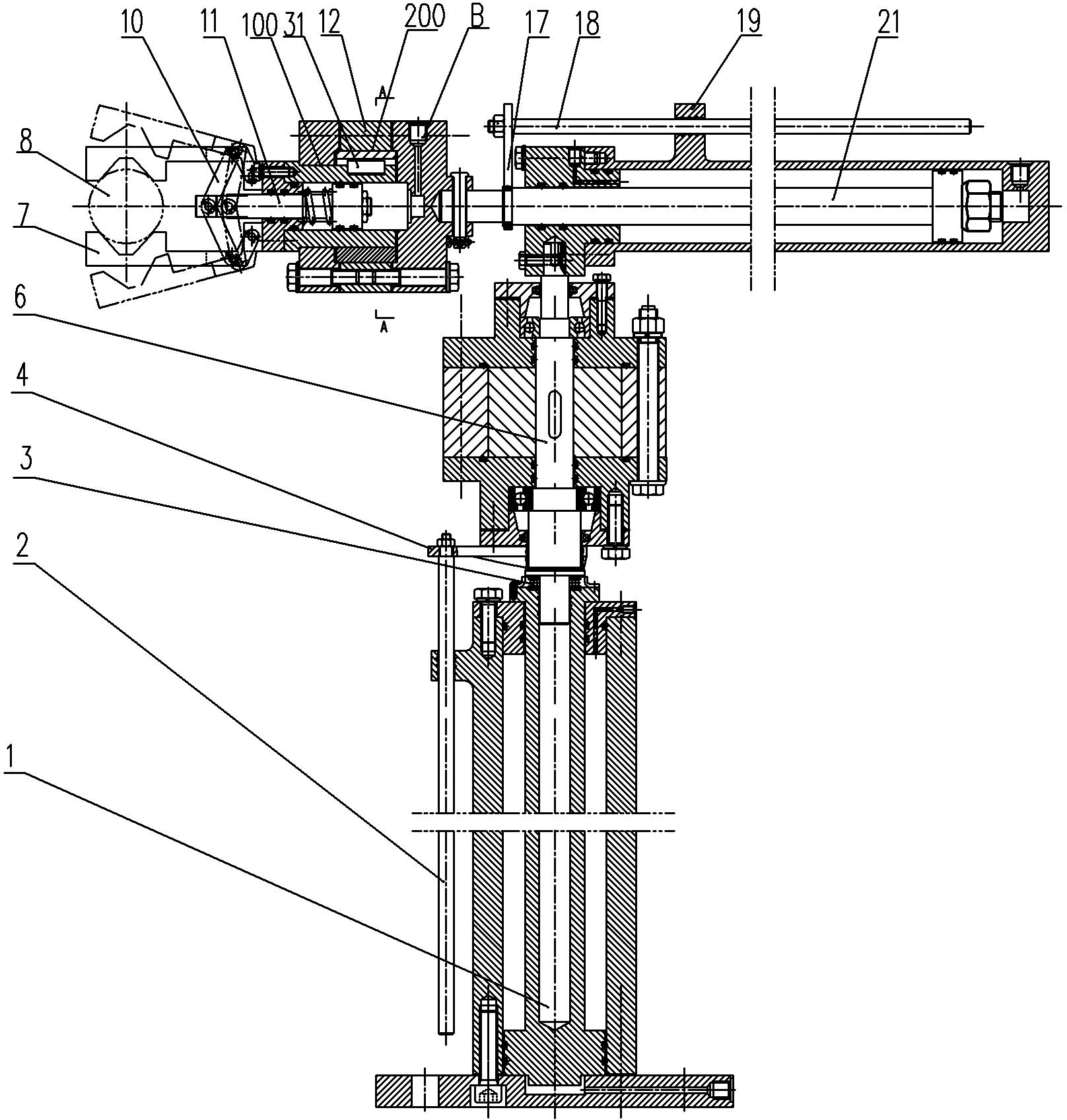
[0011] Such as figure 1 , figure 2 As shown, an embodiment of a bionic manipulator is shown. The bionic manipulator in this embodiment includes a body lifting cylinder 1 extending in a vertical direction. The output end of the body lifting cylinder 1 is fixedly provided with the center of the body lifting cylinder. The axis of the body revolving cylinder 6 is fixedly provided with an arm telescopic cylinder 21 extending in the horizontal direction on the output end of the body revolving cylinder 6, and the center of the arm telescopic cylinder is fixed on the output end of the arm telescopic cylinder 21 The axis-rotating wrist revolving cylinder 12 includes a fixed cylinder block fixed on the output end of the arm telescopic cylinder, and the fixed cylinder is provided with a revolving hole extending axially along the central axis of the arm telescopic cylinder, A drive telescopic cylinder 11 is installed in the revolving hole. The drive telescopic cylinder includes a drive cy...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More