

Industrial robot positioning precision calibration method
An industrial robot and positioning accuracy technology, applied in the field of robot calibration, to achieve the effects of high measurement accuracy, improved absolute positioning accuracy, and strong versatility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The preferred embodiments of the present invention will be described below in conjunction with the accompanying drawings. It should be understood that the preferred embodiments described here are only used to illustrate and explain the present invention, and are not intended to limit the present invention.
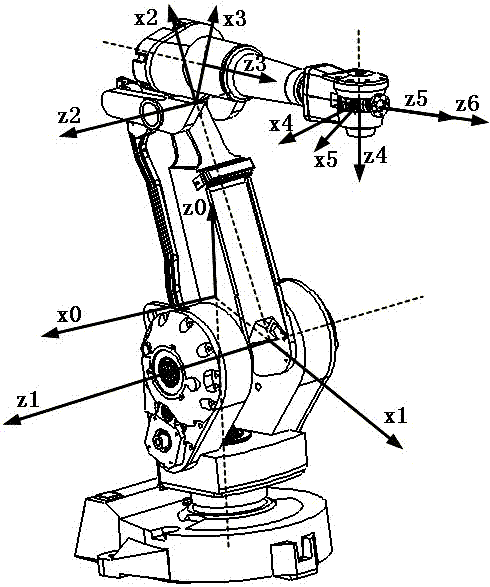
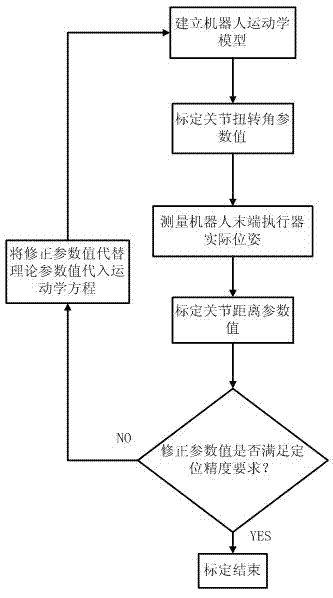
[0028] See attached Figure 1~2 , the industrial robot positioning accuracy calibration method of the present invention comprises the following steps:
[0029] (1) Establish the kinematics model of the robot
[0030] Robot kinematics analysis is usually represented by the Denavit-Hartenberg (D-H) connection transformation homogeneous coordinate model.
[0031] exist figure 1 In , first specify a local reference coordinate system for each joint, and then transform the two adjacent joints. transforming, The angle represents the rotation angle around the z-axis (also called the joint rotation angle), d represents the distance between two adjacent public vertical l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More