

Loading and unloading manipulator
A manipulator and gripper technology, applied in the field of robot application and automatic loading and unloading, to achieve the effect of good applicability, simple operation process and saving construction cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The loading and unloading manipulator of the present invention will be described in detail below in conjunction with the embodiments and accompanying drawings.
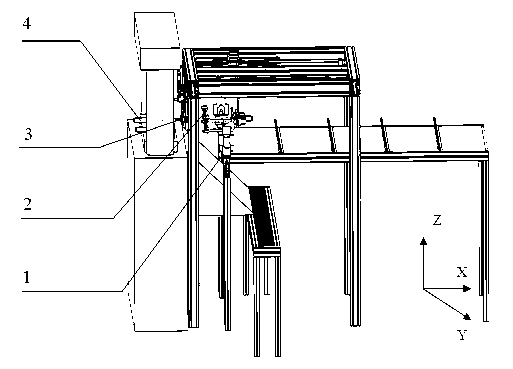
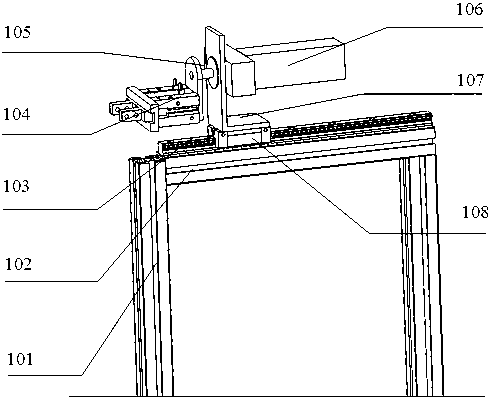
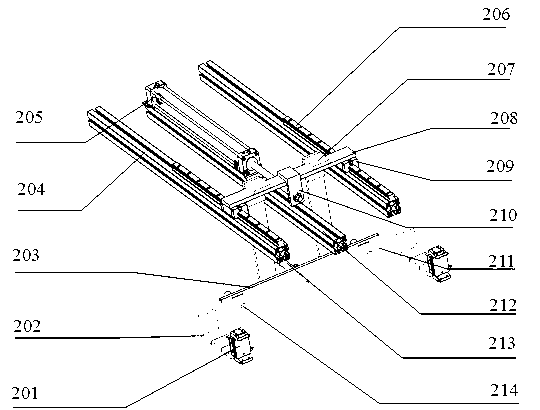
[0020] The loading and unloading manipulator designed by the present invention (abbreviated as manipulator, see Figure 1-5 ), which is mainly applicable to the punching process of the aluminum frame of the solar panel (referred to as the aluminum frame), based on the requirements of loading and unloading of the aluminum frame, following the modular design idea of the manipulator structure, and designed according to the workflow of loading and unloading of the aluminum frame. The manipulator designed in the present invention includes a mechanical structure part and a control system part. The mechanical structure part is composed of four modules, including the rotating workpiece module 1, the loading module 2, the clamping module 3 and the unloading module 4; the control system part is composed of the motion c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More