

Sitting horizontal type individual lower limb rehabilitation training robot
A technology of robots and lower limbs, applied in gymnastics equipment, passive exercise equipment, sports accessories, etc., can solve the problems of inability to provide equipment adjustment and control, and rehabilitation robots cannot provide personalized treatment, so as to achieve stable and reliable operation of equipment and optimization of joint mechanisms , the effect of good dynamic mechanical properties
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
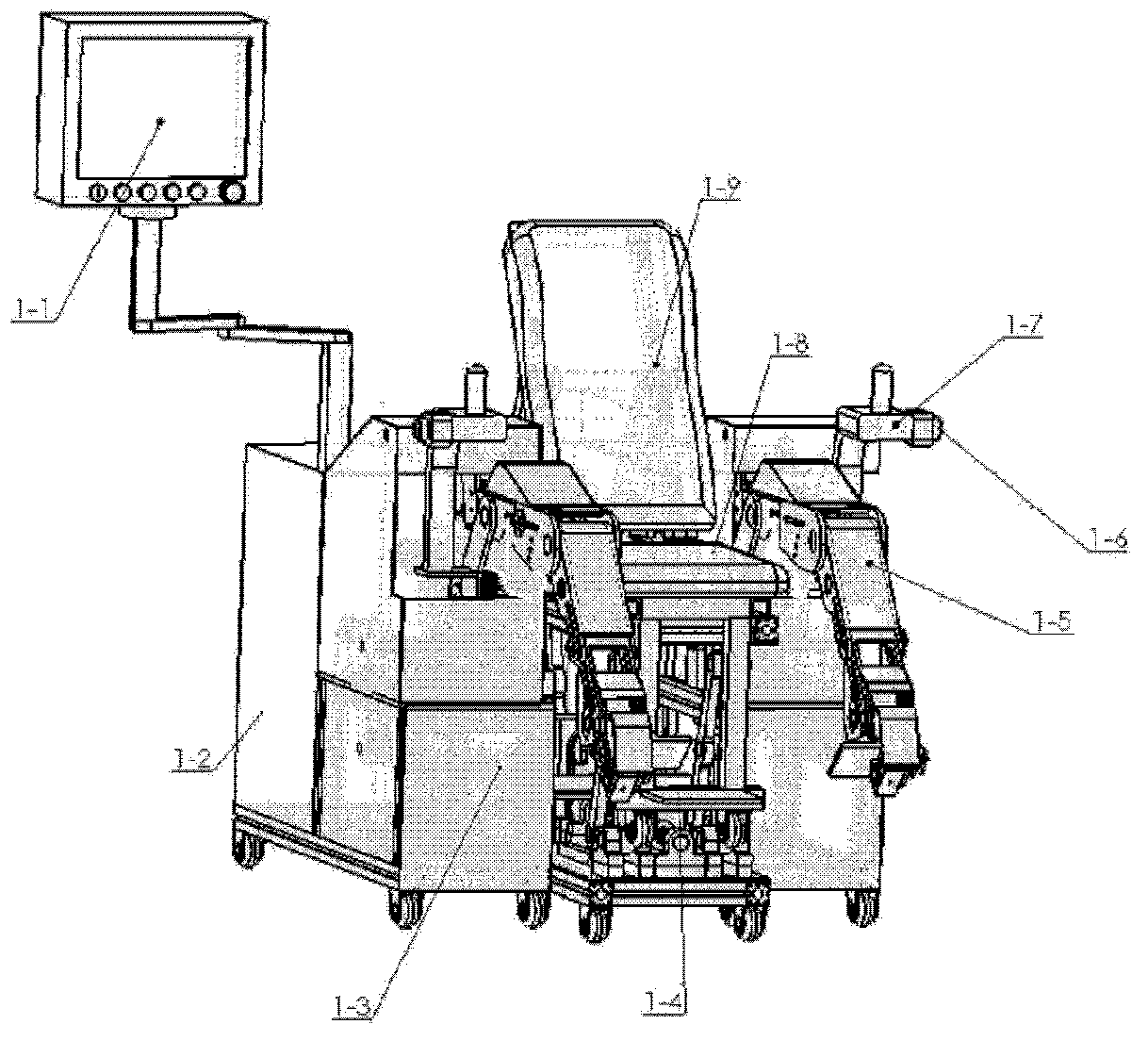
[0024] figure 1 It is the overall structural diagram of the sitting and lying personalized lower limb rehabilitation training robot according to the embodiment of the present invention, as figure 1 As shown, the sitting and lying personalized lower limb rehabilitation training robot provided by the present invention includes 4 main modules: left and right two leg mechanisms, a middle seat mechanism and a man-machine interface 1-1, and the rehabilitation training robot adopts a module With the modernized design, it can be disassembled and assembled very conveniently, which is convenient for commissioning and maintenance.
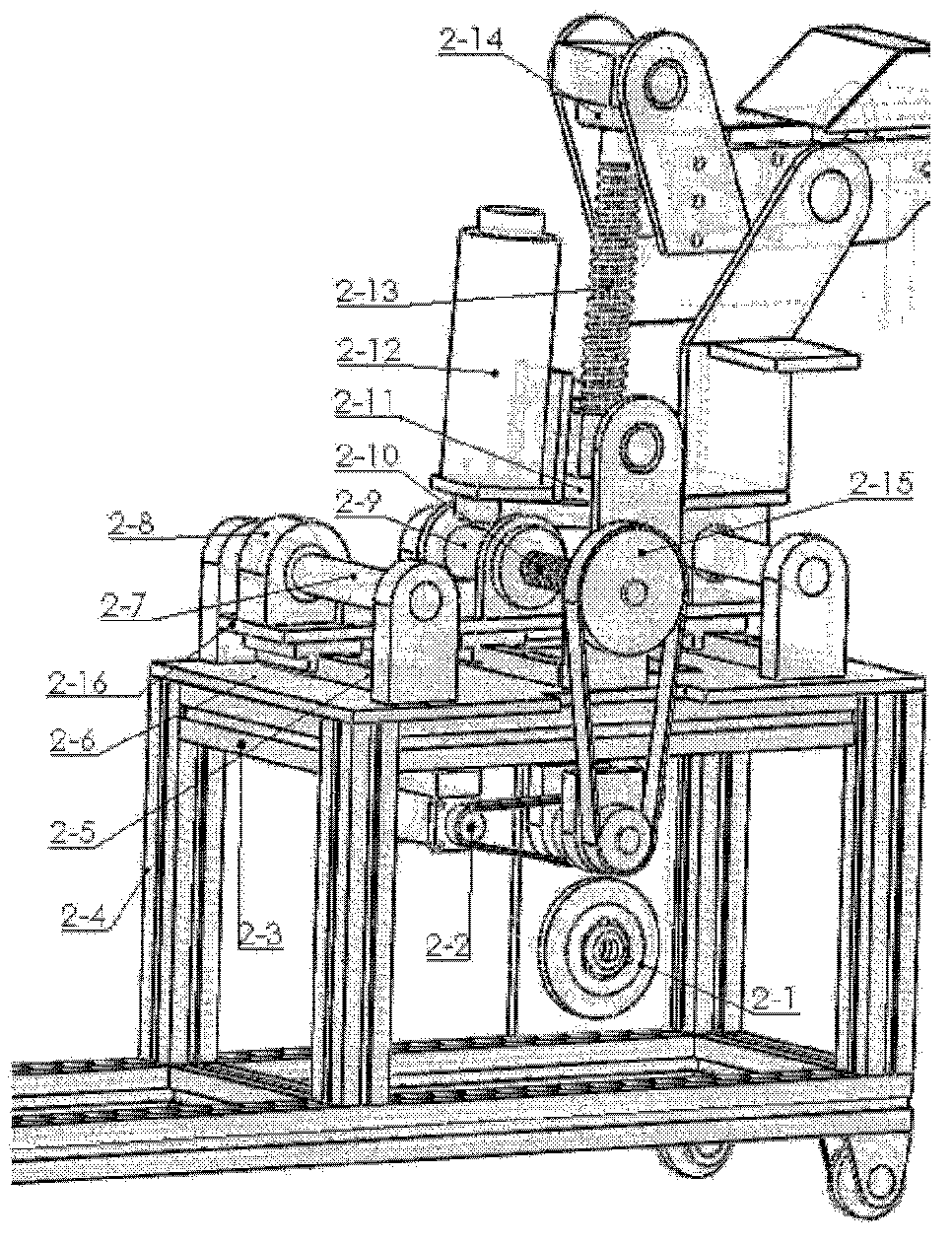
[0025] The composition of described left and right two leg mechanisms is exactly the same, and is na...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More