

Method for determining three-probe star sensor gesture
A determination method and sensor technology, applied in the space field, can solve the problems of the star sensor's reduced star detection ability, the inability to guarantee simultaneous shooting of navigation stars, and the small number of navigation stars.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
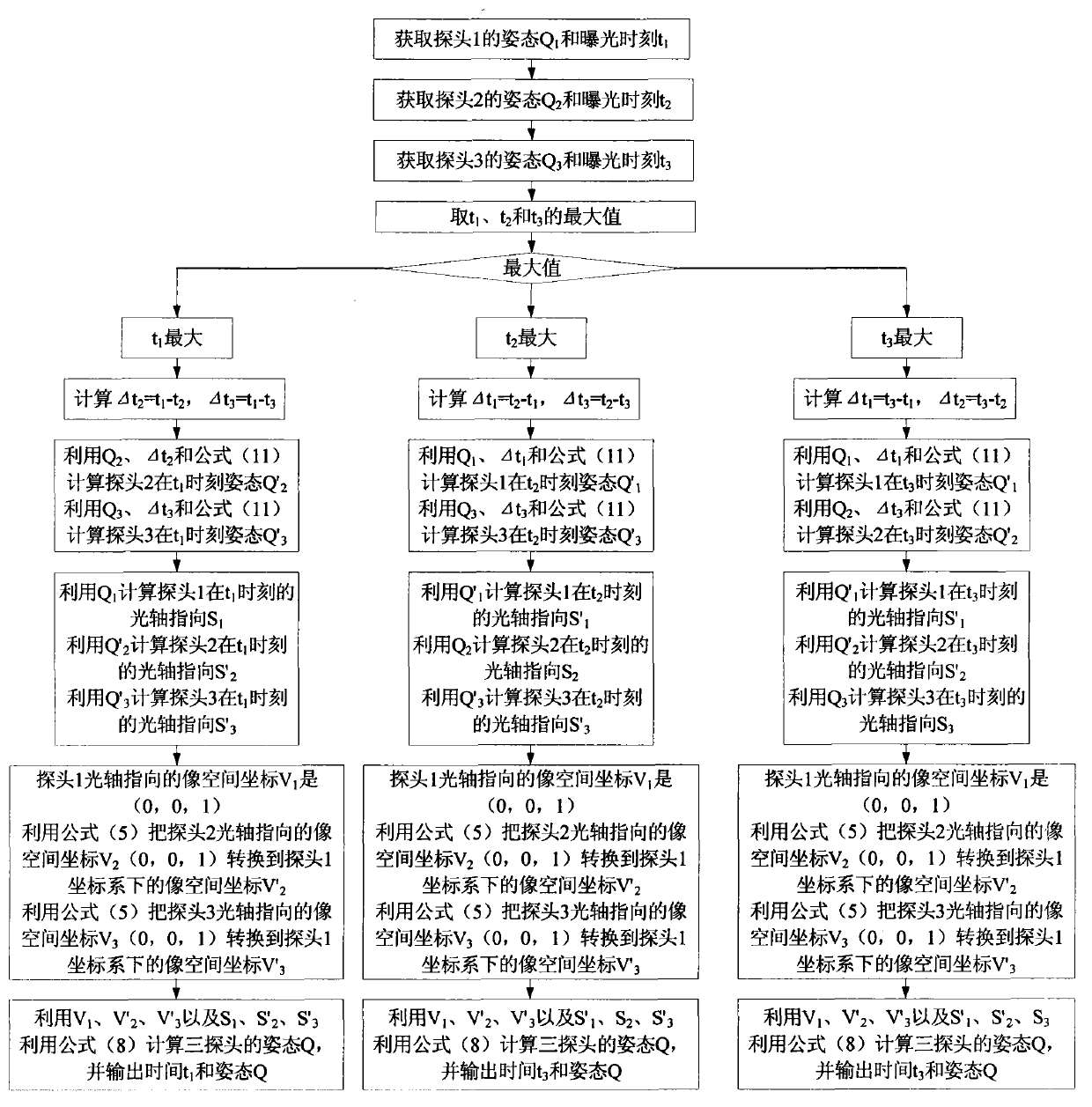
[0047] combine figure 1 , figure 2 , a method for determining the attitude of a three-probe star sensor of the present invention, the steps are as follows:
[0048] The method steps are as follows:
[0049] Step 1: Read separately
[0050] First obtain the attitude Q of the probe 1 and exposure time t 1 ;
[0051] The second obtains the attitude Q of the probe 2 and exposure time t 2 ;
[0052] The third acquisition of the attitude Q of the probe 3 and exposure time t 3 ;
[0053] take t 1 , t 2 and t 3 the maximum value;
[0054] if t 1 max; calculate Δt 2 = t 1 -t 2 , Δt 3 = t 1 -t 3 ;
[0055] Step 2: Use Q 2 , Δt 2 and formula (11)
[0056] q 10 ′ q 11 ′ q ...
Embodiment 2
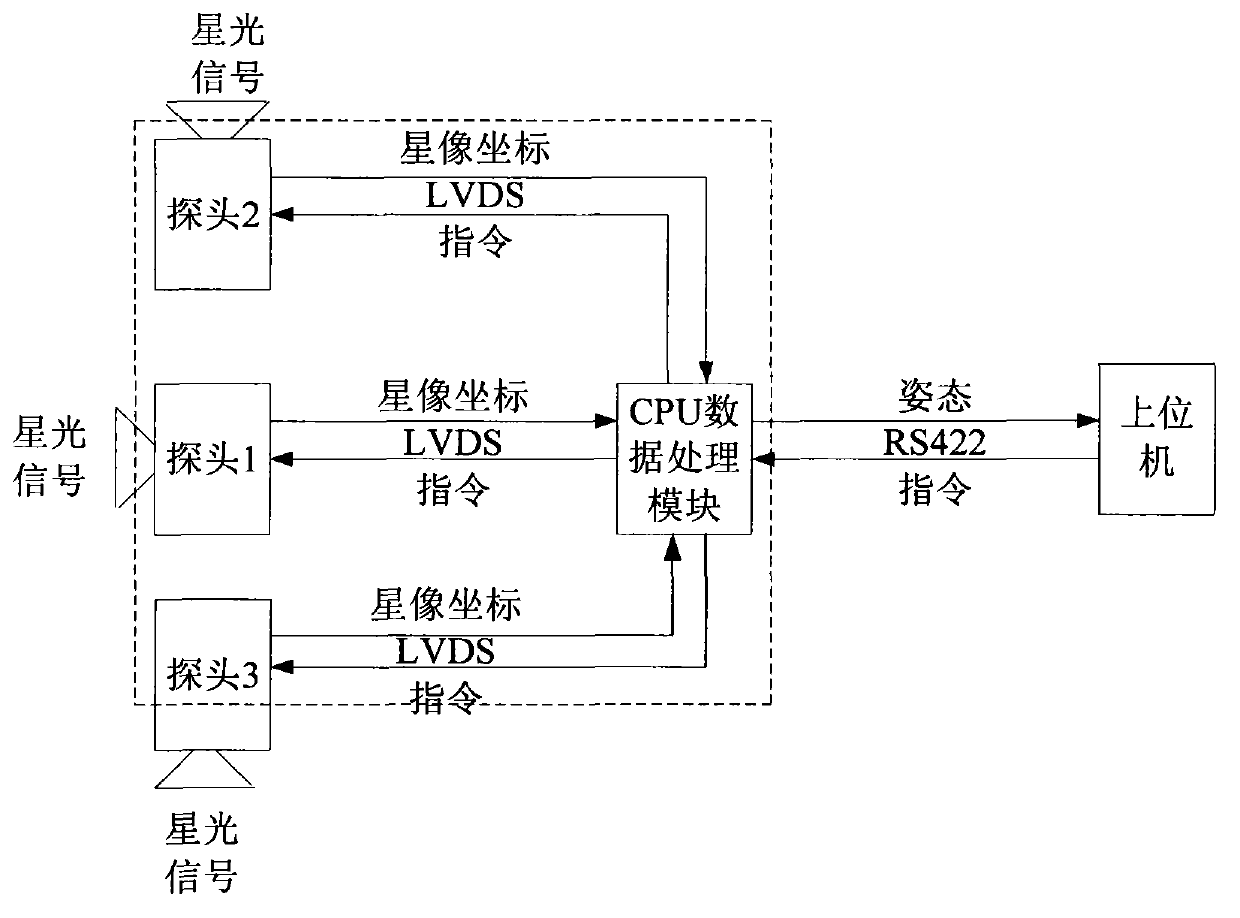
[0082] combine figure 1 , figure 2 , the attitude determination principle of the three-probe star sensor:
[0083]Three unit vectors X n , Y n ,Z n , and form a mutually orthogonal coordinate system, where: Y n and Z n modulo|Y n |=1 and |Z n |=1, record the new coordinate system F n for
[0084] F n = X n Y n Z n - - - ( 2 )
[0085] The body coordinate system of the spacecraft is F b , the spatial reference coordinate system is F r , and their coordinate bases are
[0086] F b = ...
Embodiment 3
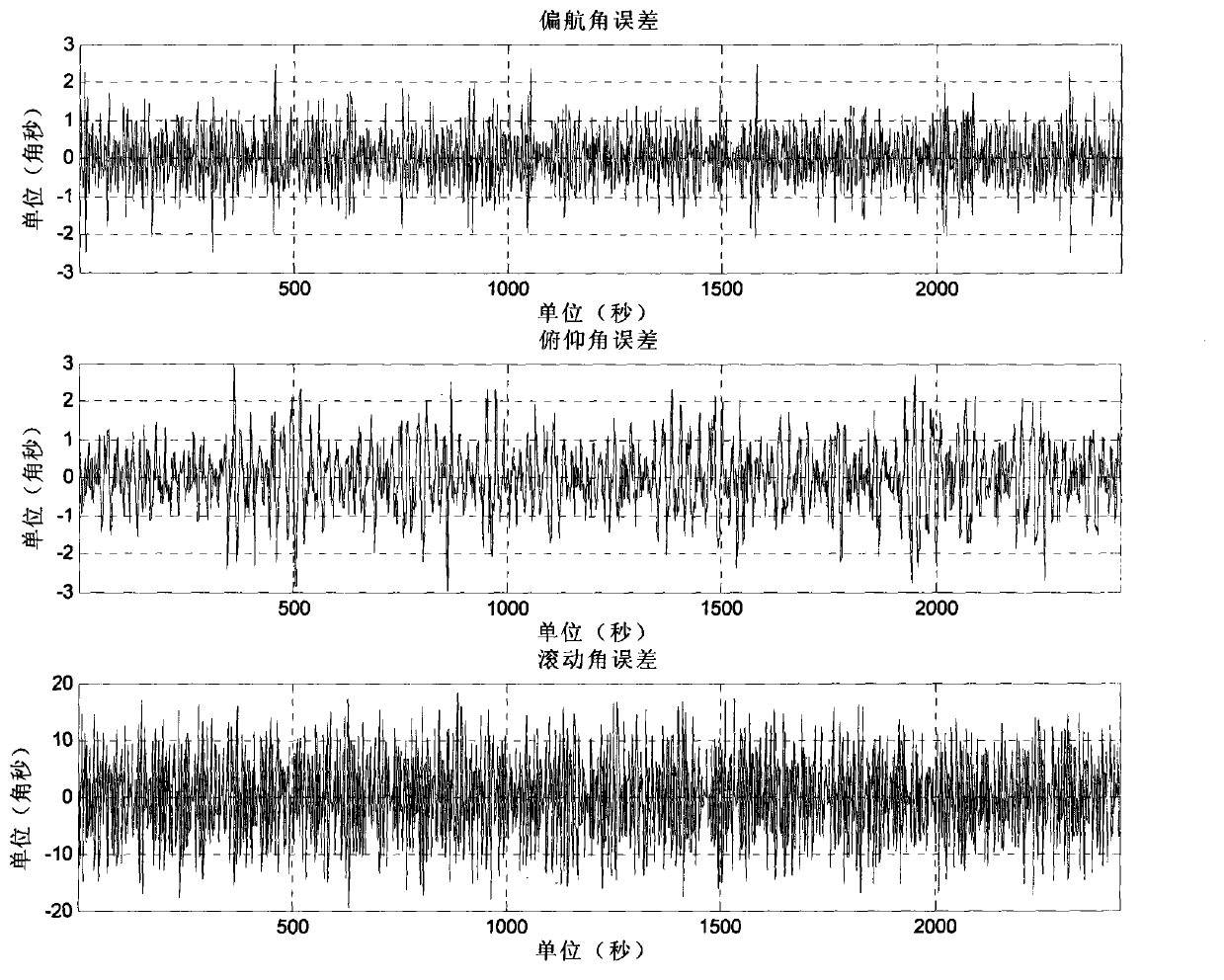
[0113] The experimental method is as follows: figure 2 As shown, put the three-probe star sensor outdoors, place the three-probe star sensor on the turntable of the earth, adjust the turntable so that all three probes can observe enough stars, and the three probes are initially randomly aimed at a certain area of the celestial sphere It is relatively stationary with the earth and rotates with the rotation of the earth for a long time. The three-probe star sensor automatically enters the star tracking mode after all-sky recognition. For the same calculation period, the three-probe star sensor first uses the star map of probe 1 to calculate the attitude, and then uses the star map of the three probes to adopt the method of the present invention. The method calculates attitude, the output adopts the three-axis attitude measurement value of probe 1 and the star map adopting three probes to adopt the method of the present invention to calculate attitude, and outputs these two gr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More