

Cooperative landing method for multiple unmanned aerial vehicles
A multi-UAV, UAV technology, applied in the direction of instruments, adaptive control, control/regulation systems, etc., can solve problems that are rarely covered in literature
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
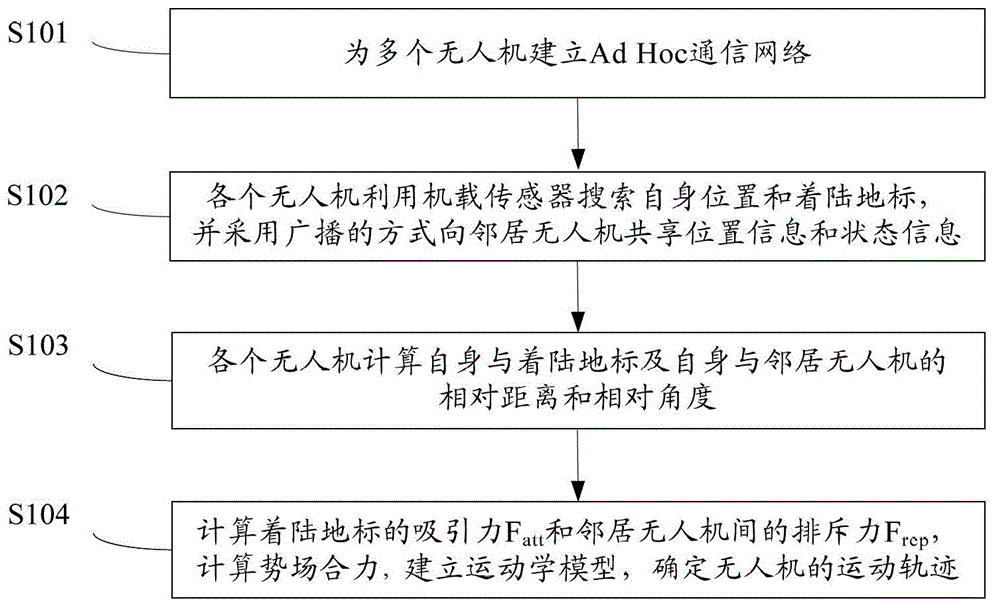
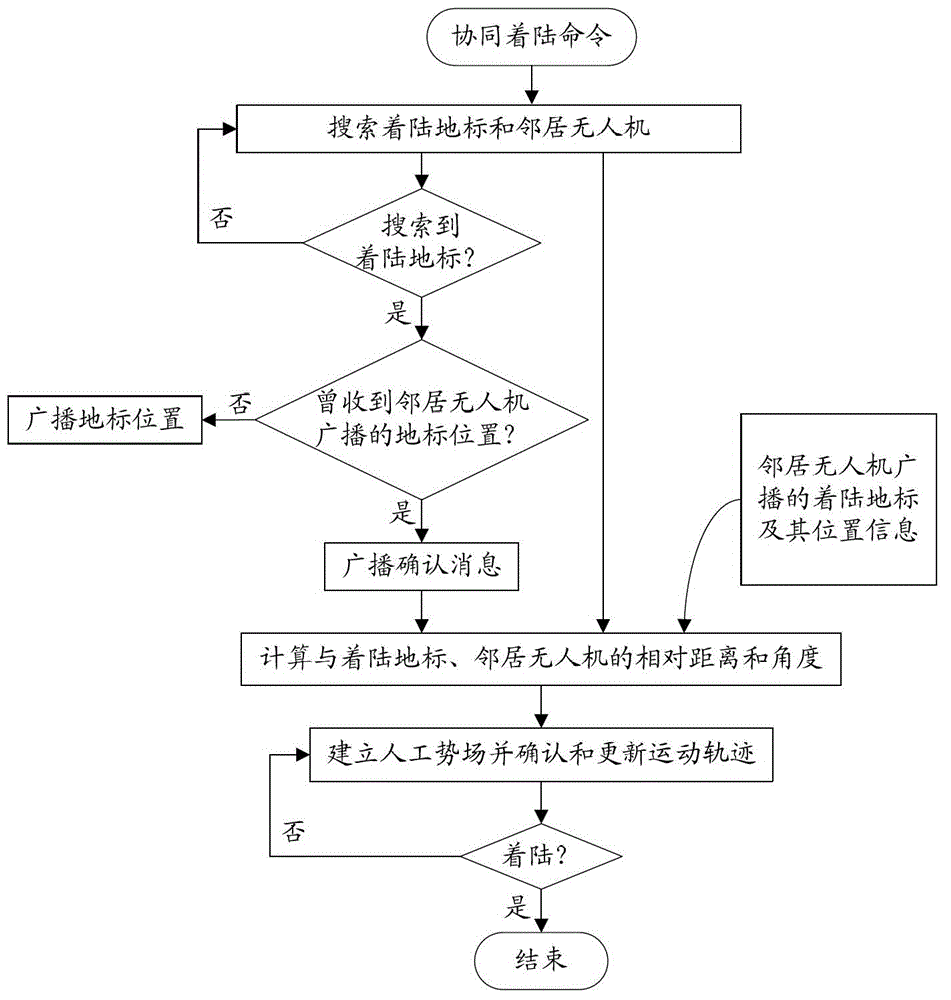
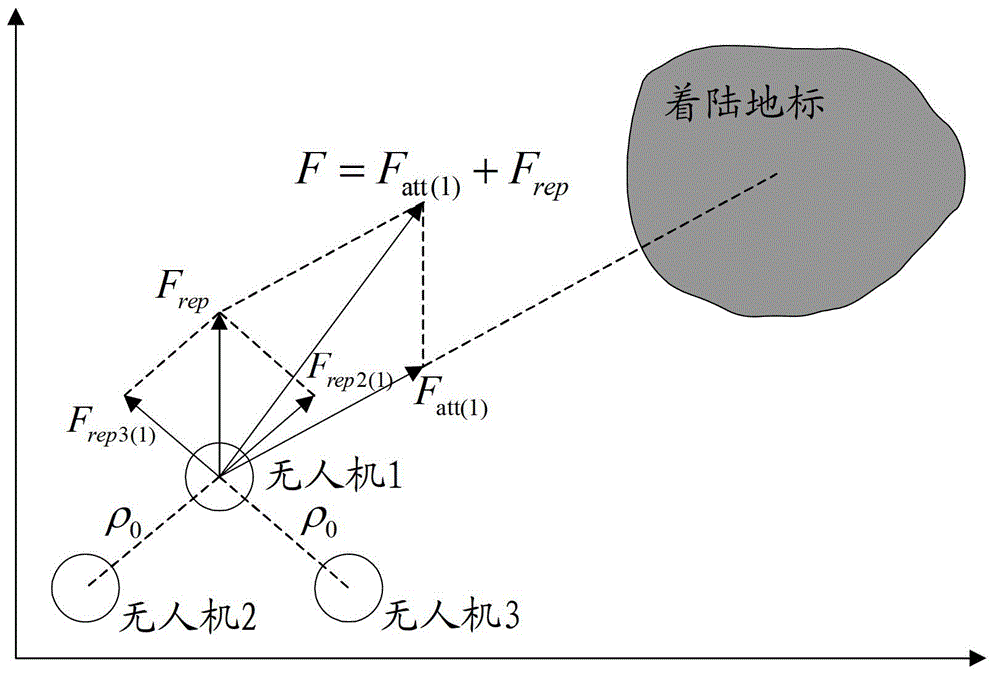
[0024] In the present invention, a plurality of unmanned aerial vehicles establishes an Ad Hoc communication network, and each unmanned aerial vehicle uses an airborne sensor to search for a landing landmark and recognizes neighbor unmanned aerial vehicles, and uses a wireless link to share position and status information in a broadcast manner; then calculates its own and The relative distance and angle of the landing landmark and the neighbor drones; then use the artificial potential field method to construct the environmental space potential field, calculate the attraction of the landing landmark and the repulsion between the neighbor drones to ensure flight safety, and establish a kinematics model And determine the trajectory; Finally, during the landing process, the respective trajectory is continuously updated and adjusted to achieve a coordinated and safe landing.
[0025] Embodiments of the present invention are described in detail below, and examples of the embodiments ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More