

System and method for accurate positioning control under overweight environment
A technology of precise positioning and control system, applied in the direction of control, measuring device, instrument, etc. using feedback, it can solve the problems of easy deformation of its own structure, inability to achieve precise positioning of multi-axis robot system, difficulty of precise positioning of the system, etc. Reliability and safety, low weight, high positioning accuracy and repeatability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
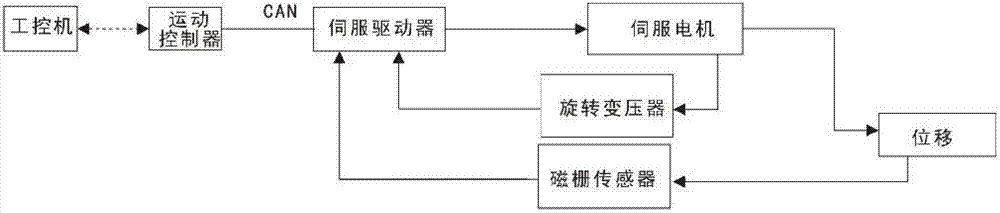
[0043] like figure 1 As shown, the precise positioning control system in the overweight environment is a uniaxial positioning control system, the drive unit of the uniaxial positioning control system is 1 set, and the number of magnetic grid sensors in the uniaxial positioning control system is 1 , the servo motor is installed vertically on the base plate; the controlled mobile bracket is fixed on the slider of the linear guide rail, and moves with the slider; the screw is installed on the base plate through the screw support seat, and one end directly extends into the hollow shaft of the motor Inside, the lead screw nut is connected to the controlled mobile bracket; the magnetic head of the magnetic grid sensor is fixed on the mobile bracket, and the magnetic strip of the magnetic grid sensor is installed on the base plate. When working, the servo motor drives the lead screw to rotate, and the lead screw nut drives the controlled moving bracket connected with it to move on th...
Embodiment 2
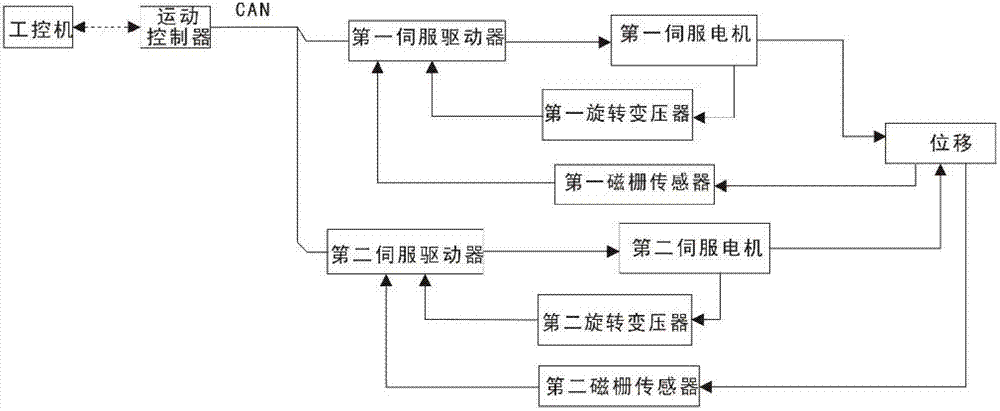
[0053] like figure 2 As shown, the precise positioning control system in the overweight environment is a dual-axis positioning control system, the drive unit is two sets, the drive unit is divided into a first drive unit and a second drive unit, and the first drive unit includes A first servo motor, a first servo driver, and a first resolver, and the second drive unit includes a second servo motor, a second servo driver, and a second resolver. The communication interfaces of the servo drivers in the two sets of drive units are all connected to the communication interfaces of the motion controller. The control principle of each single axis in the dual-axis positioning control system is basically the same as that of the single-axis positioning control system. The first resolver and the second resolver are used to measure the speeds of the first servo motor and the second servo motor respectively. The grid sensor and the second magnetic grid sensor respectively measure the disp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More