

Robot navigation method and robot navigation system based on color coding identifiers
A technology of color coding and navigation method, which is applied in the field of robot navigation control, can solve problems such as poor adaptability to complex environments, mutual interference of sensors, accumulation of navigation errors, etc., and achieve the effect of being suitable for promotion and application, simple in principle and strong in scalability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
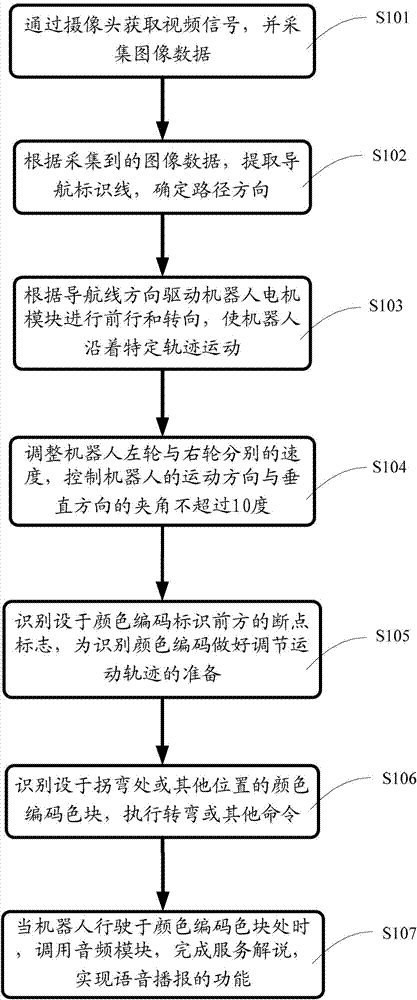
[0046] Such as figure 1 As shown, a color-coded identification-based robot navigation method includes the following steps:
[0047] In step S101, a video signal is acquired through a camera, and image data is collected. The robot obtains the video signal through the camera. The digital camera is a digital video input device. The color bit is generally 24bit, and the average video capture speed is 30 frames per second.
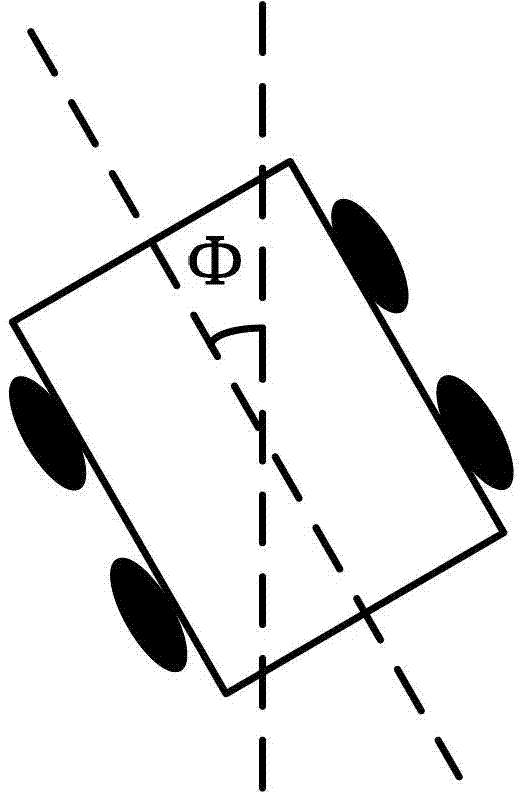
[0048] Step S102, extracting the navigation marking line and determining the path direction according to the collected image data. Image processing is performed on the collected image data to identify and extract the navigation line, that is, to separate the navigation line from the background image. Identify the navigation marking lines laid on the ground through the visual method. The advantage of this method is that it has strong versatility. No matter what kind of environment it is in, as long as there is a track line, the robot can move along the line, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More