Self-balancing manned solowheel based on inertia balance wheel
An inertial balance and balance wheel technology, applied in the field of intelligent robots, can solve problems such as the inability to realize the control of a self-balancing vehicle with a single wheel, and the control steps are not fully disclosed, and achieve simple structure, convenient disassembly and replacement, and easy assembly and maintenance effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] Specific embodiments of the present invention will be described below in conjunction with the accompanying drawings.
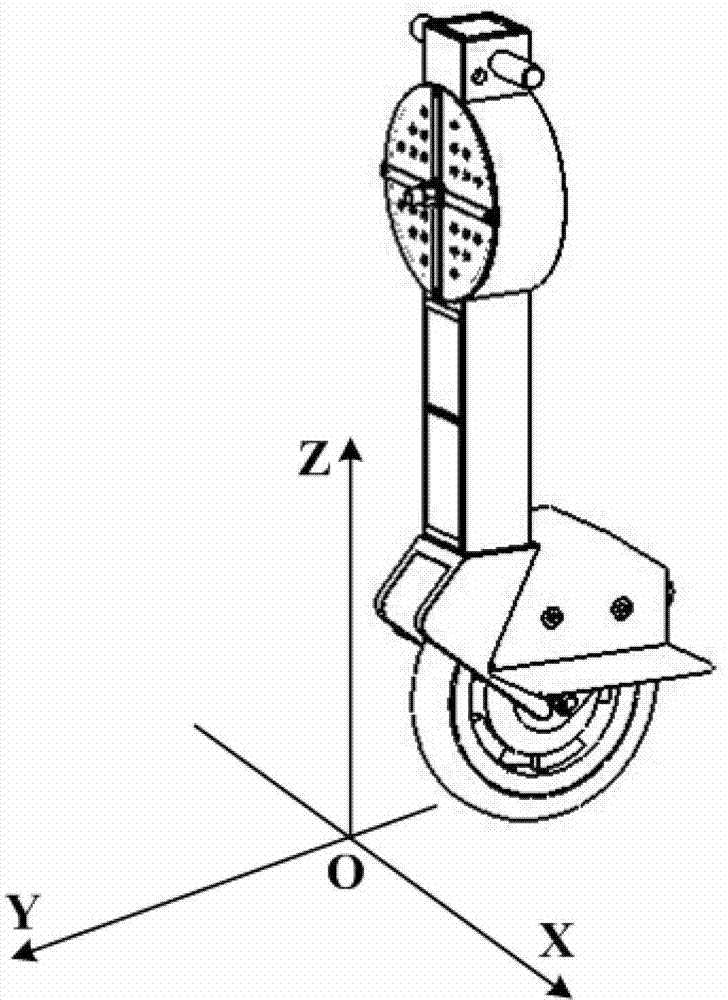
[0060] Establish the spatial reference coordinate system of the manned self-balancing unicycle system as follows: figure 1 shown. In the figure, the left-handed coordinate system is established with the contact point between the wheel (9) of the unicycle and the ground as the origin of the spatial reference coordinate system, the positive direction of the Y-axis is the forward direction of the unicycle, the positive direction of the X-axis is the left direction of the unicycle, and the positive direction of the Z-axis The positive direction is the upward direction when the unicycle station is standing. The XOZ plane is the plane of the unicycle tilt angle in the left and right direction, and its roll angle is Φ; the YOZ plane is the plane of the unicycle tilt angle in the front and rear direction, and its pitch angle is θ. When the unicycle is balance...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More