

Double-degree-of-freedom robot shoulder joint steering engine
A robot shoulder and degree of freedom technology, applied in the field of robotics, can solve the problems of large body inertia and poor dynamic response, and achieve the effect of compact joint structure, excellent dynamic performance and reduced space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further described below in conjunction with drawings and embodiments.
[0025] figure 1 Shown is a schematic diagram of the steering gear. It is a T-shaped staggered structure, and there is an output shaft in each of the two axis directions to provide driving force.
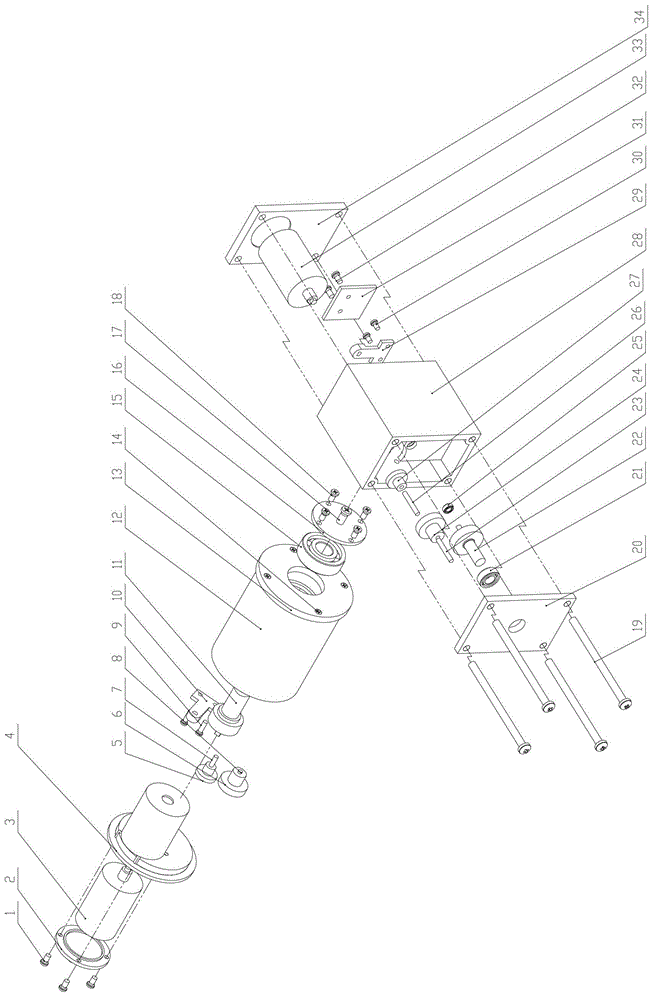
[0026] Such as figure 2 Shown is the assembly explosion diagram of the steering gear. The steering gear consists of the X-direction motor end cover screw 1, the X-direction motor end cover 2, the X-direction motor 3, the X-direction motor sleeve 4, the X-direction first gear 5, and the X-direction second gear. Two gears 6, X-direction first spindle 7, X-direction second spindle 8, X-direction fixing screw 9, X-direction angle sensor 10, X-direction output gear 11, X-direction housing 12, X-direction output shaft end cover 13. X direction output shaft cover screw 14, X direction output shaft bearing 15, connection plate 16, shaft end screw 17, connection plate fixing screw ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More