

Aircraft optimal path determination method based on mixed probability A star and agent
An aircraft and intelligent body technology, applied in the field of spatial data processing, can solve the problems of reduced dependence, inability to calculate, and inability to adapt to motion, etc., to achieve the effect of shortening the path length, reducing the threat value, and overcoming the lack of robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
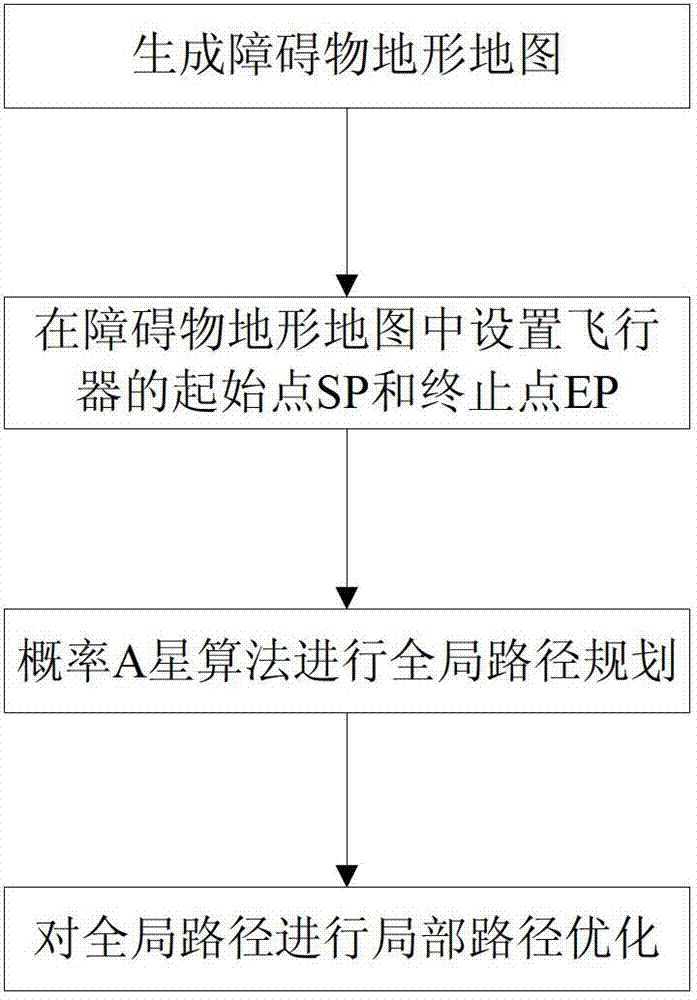
[0039] Attached below figure 1 The steps of the present invention are further described in detail.
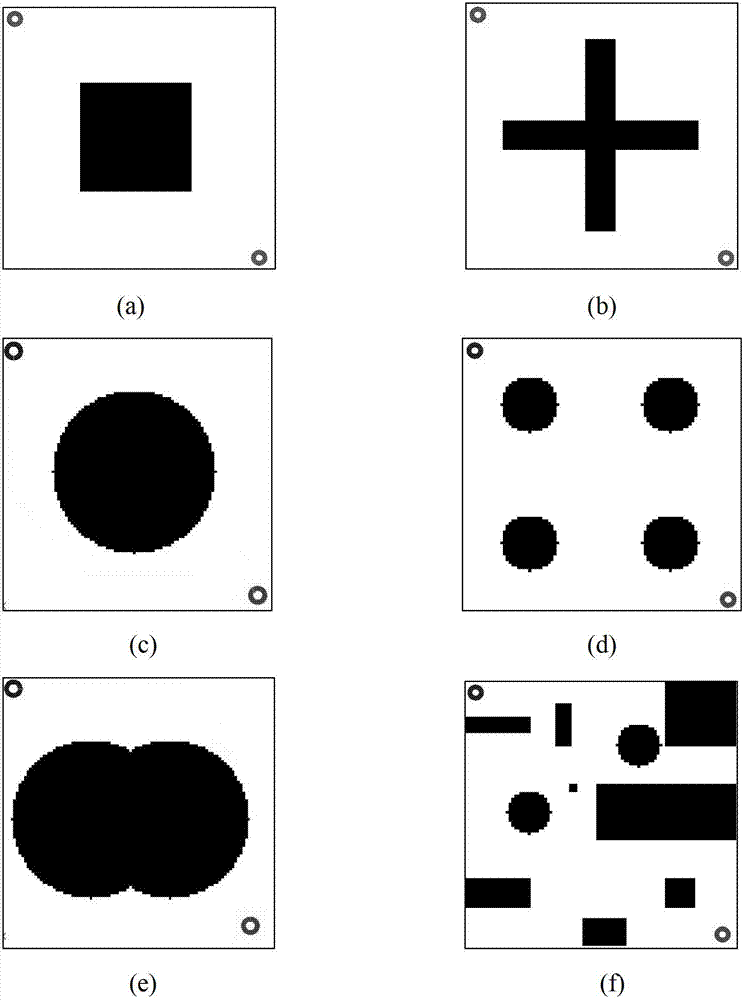
[0040] Step 1. Generate obstacle terrain map:
[0041] let p i ,q i are the coordinates of the starting point and the ending point of each obstacle that the aircraft needs to bypass, respectively for p i point and q i Points make a straight line perpendicular to the X-axis and Y-axis, and the four lines form a rectangle, indicating the obstacle area T i , where i is the number of obstacle areas.
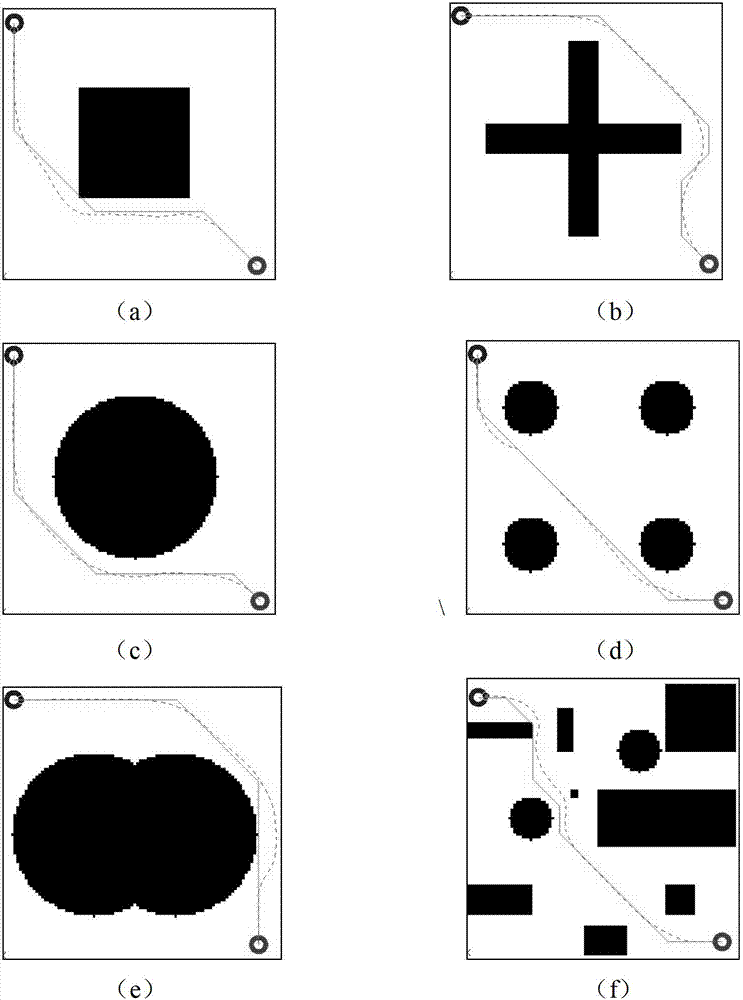
[0042] Step 2. Set the start point SP and end point EP of the aircraft in the obstacle terrain map.
[0043] Step 3. According to the positions of the starting point SP and the ending point EP of the aircraft in step 2, use the probability A-star algorithm to plan the global path.
[0044] refer to figure 2 , the specific implementation of this step is as follows:
[0045] 3a) Divide the obstacle terrain map into a low-precision grid map:
[0046]3a1) Generate a high-precis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More