

Automatic deviation correction laser navigation system
A technology of laser navigation and automatic deviation correction, which is applied in the field of laser navigation, can solve problems such as inability to guide the car, return to the correct track, and complicated control methods, and achieve the effects of reducing off-target phenomena, avoiding vibration, and simple control methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
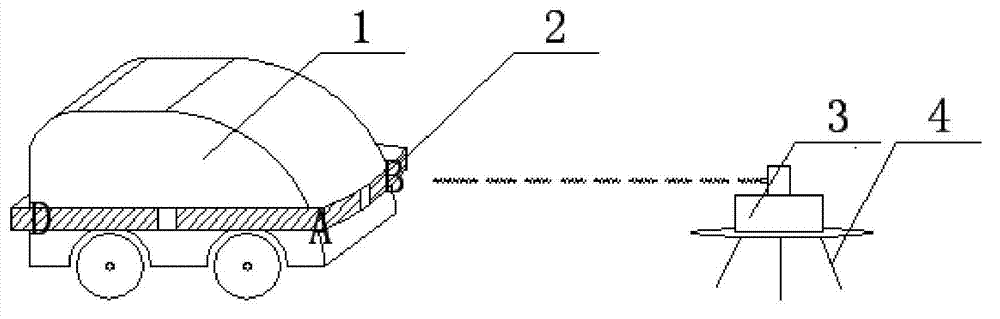
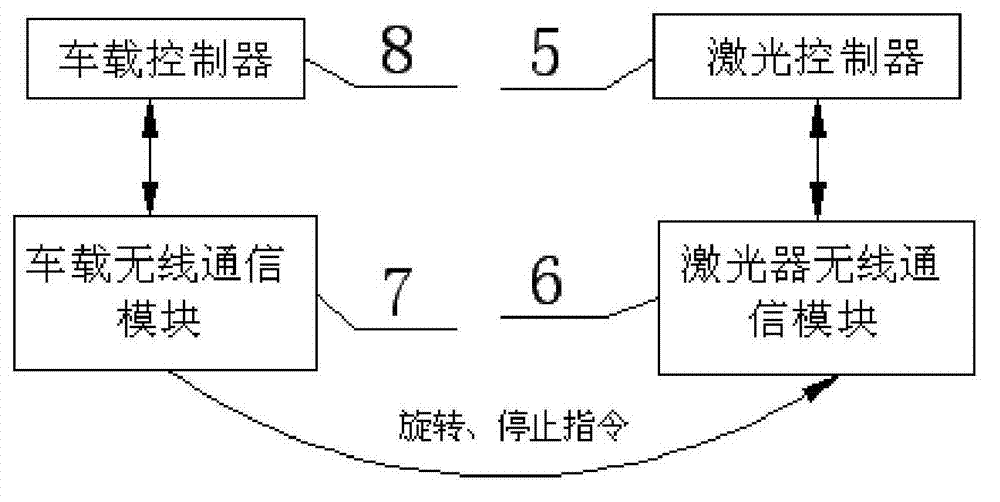
[0025] Such as figure 1 with image 3 As shown, an automatic deviation correction navigation system includes a vehicle system and a laser system. The vehicle-mounted system includes a mobile car 1 , a photosensitive battery pack 2 , a vehicle-mounted wireless communication module 7 , and a vehicle-mounted controller 8 . Wherein, the photosensitive battery pack 2 is fixed around the mobile car 1 , the vehicle-mounted controller 8 is located in the mobile car 1 , and the vehicle-mounted wireless communication module 7 is connected to the vehicle-mounted controller 8 . In order to reduce the resistance encountered by the photosensitive cell group 2 during the traveling process of the mobile trolley 1, the front end of the photosensitive cell group 2 has an arc-shaped structure.
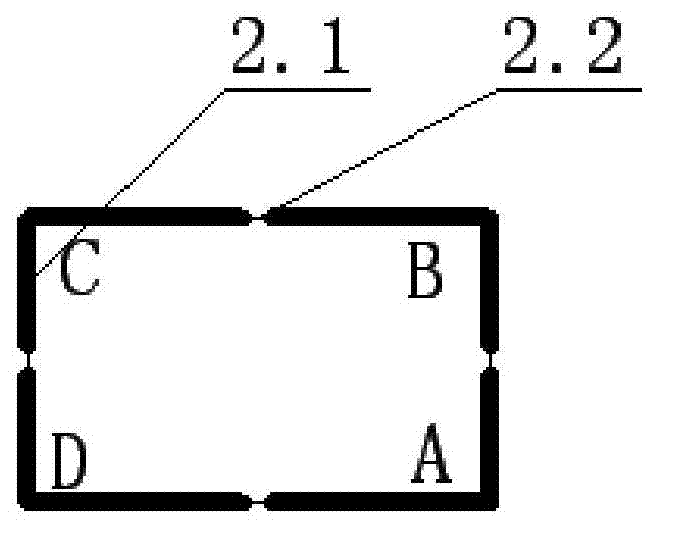
[0026] Such as figure 2 As shown, the photosensitive cell group...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More