Mole-imitating excavation robot
A robot and mole-like technology, applied in the field of bionic robots, can solve the problems of long robot body length, poor trajectory controllability, and large turning radius
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific example
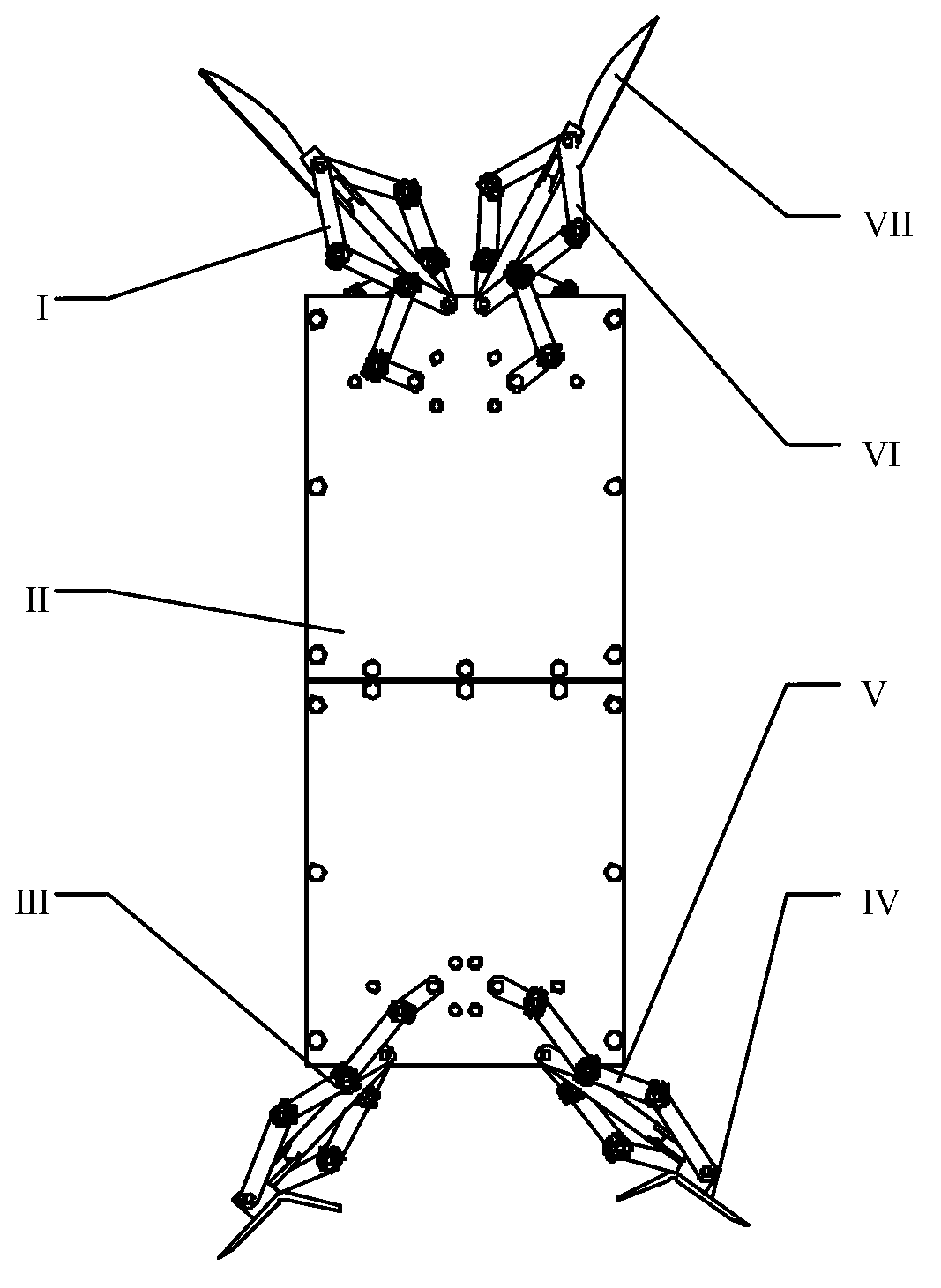
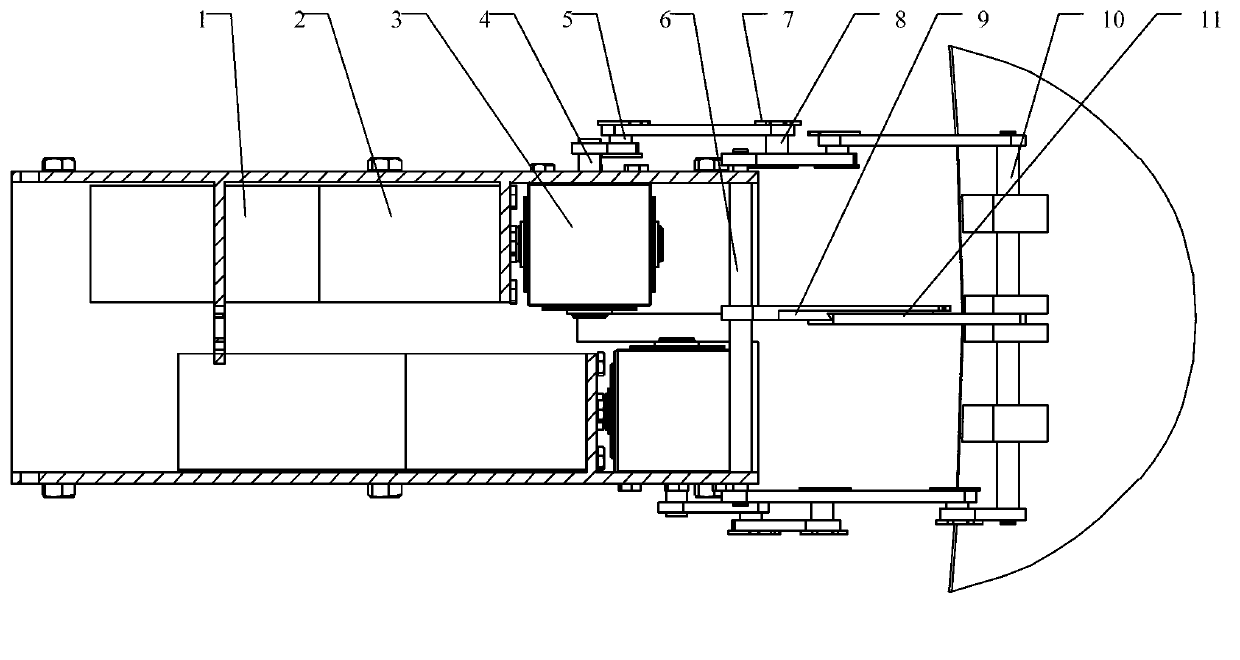
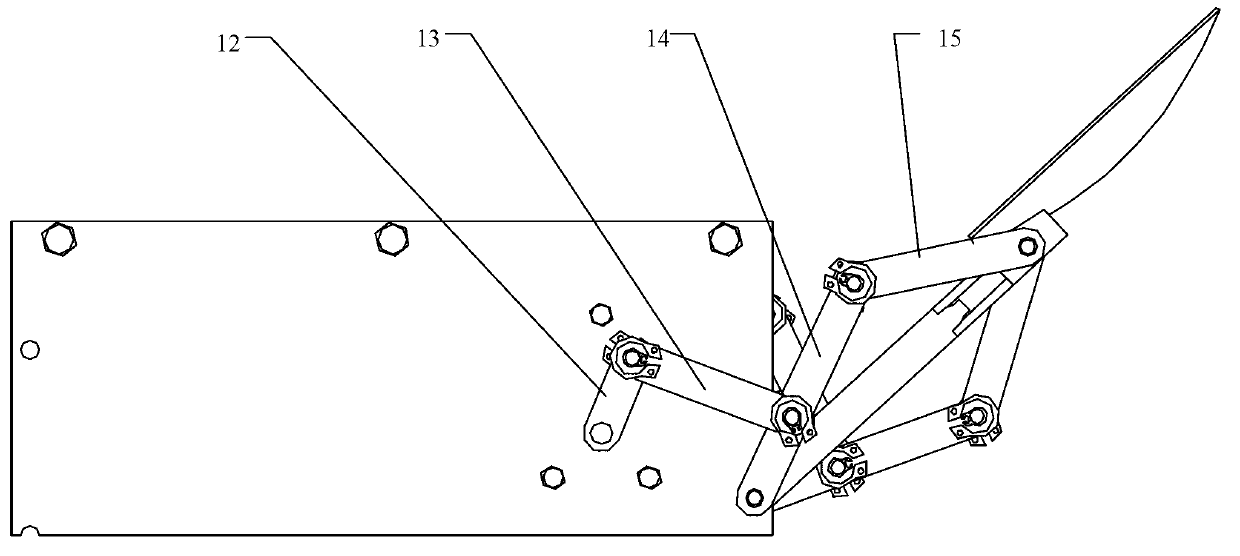
[0043] For the working soil characteristic parameters in the embodiment of this design: the internal friction angle is 24 degrees, the cohesion is about 20kPa, and the soil density is 18.4kN / m 3 . The basic design parameters are: body size (length × width × height): 413 × 170 × 86mm. The length of the crank 12 is 22mm, the length of the connecting rod 13 is 46mm, the length of the rocker 14 is 80mm, the effective length of the rocker 14 in the double crank rocker mechanism is 24mm, and the length of the end connecting rod 15 is 56mm. The swing angle of the limbs is 139 degrees. The extensible distance of limbs is 56mm. Other design parameters are: the motor 1 has a diameter of φ32mm and a length of 62.9mm, the reduction box 2 has a diameter of φ32mm and a length of 46.2mm, and the size of the steering gearbox 3 (length×width×height) is 52×34×34mm. The reducer 28 has a diameter of φ19mm and a length of 15.5mm, and a twist drive motor 29 has a diameter of φ22mm and a length o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com