Space mass measurement device by utilizing sensing property of ferromagnetic droplets in gradient magnetic field
A technique of gradient magnetic field and quality measurement, which is applied in the direction of weighing, instrument, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
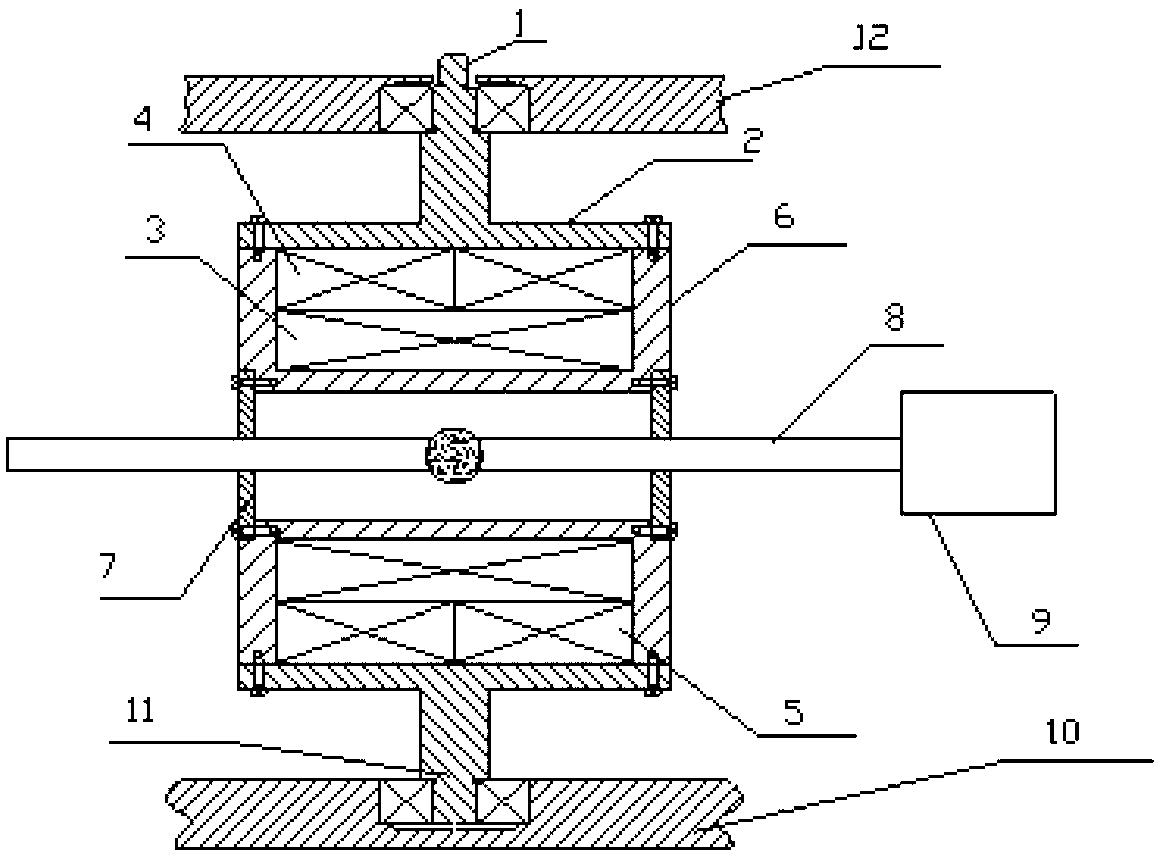
[0018] like figure 1 As shown, in this embodiment, the space mass measuring device provided according to the present invention includes: an upper rotating shaft 1 and a lower rotating shaft 11, a coil housing 2, an excitation and holding coil 3, a first detection coil 4 and a second detection coil Coil 5 , coil support sleeve 6 , sleeve end cap 7 , ferromagnetic droplet module 8 , weighing box 9 , base 10 , and limit cover 12 . The connection relationship is as follows: the upper rotating shaft 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More