

Non-self-propelled ship intelligent displacement system and displacement method based on adaptive algorithm
An adaptive algorithm and displacement system technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the problems of large manpower demand, backwardness, difficulty in guaranteeing construction speed and precision, etc., and achieve automation, Wide application prospects and the effect of ensuring accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] Below in conjunction with accompanying drawing and specific embodiment, the present invention will be further described:
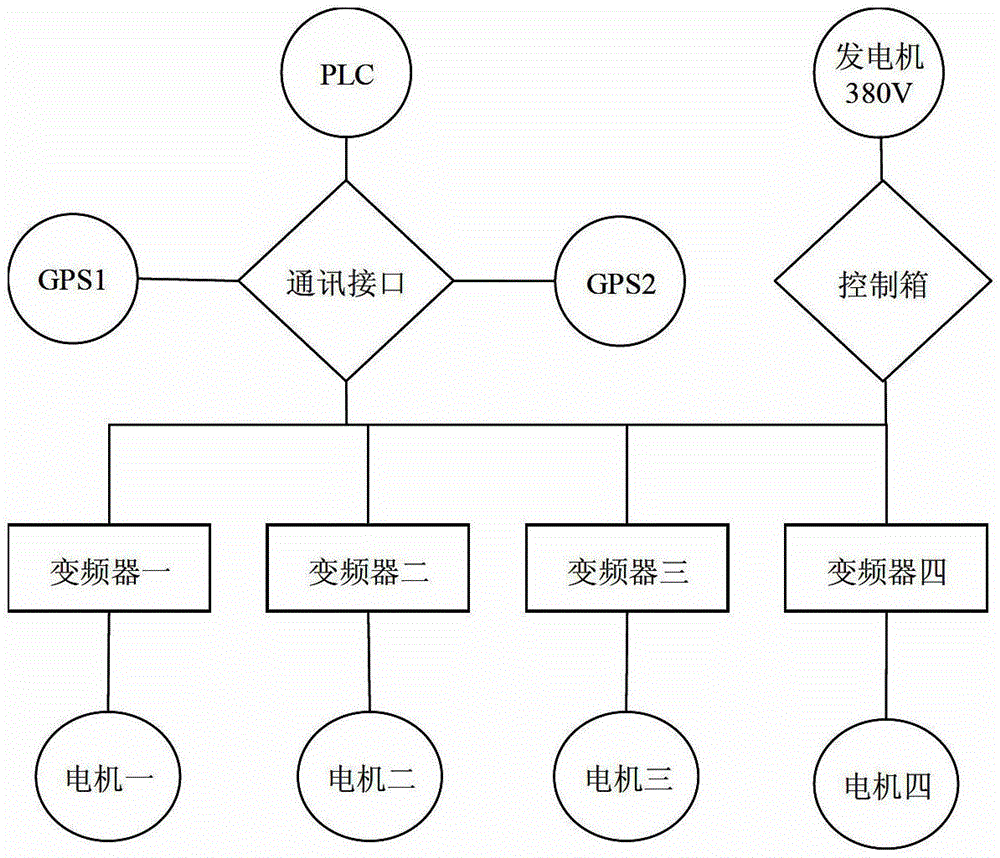
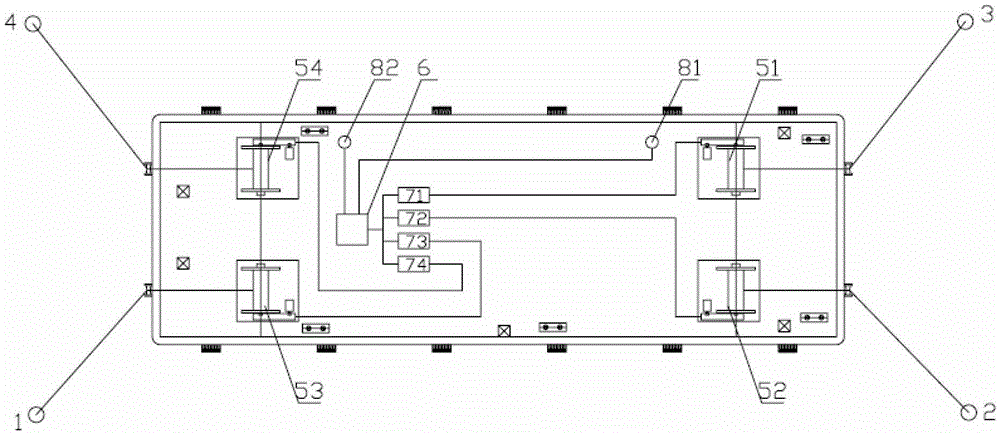
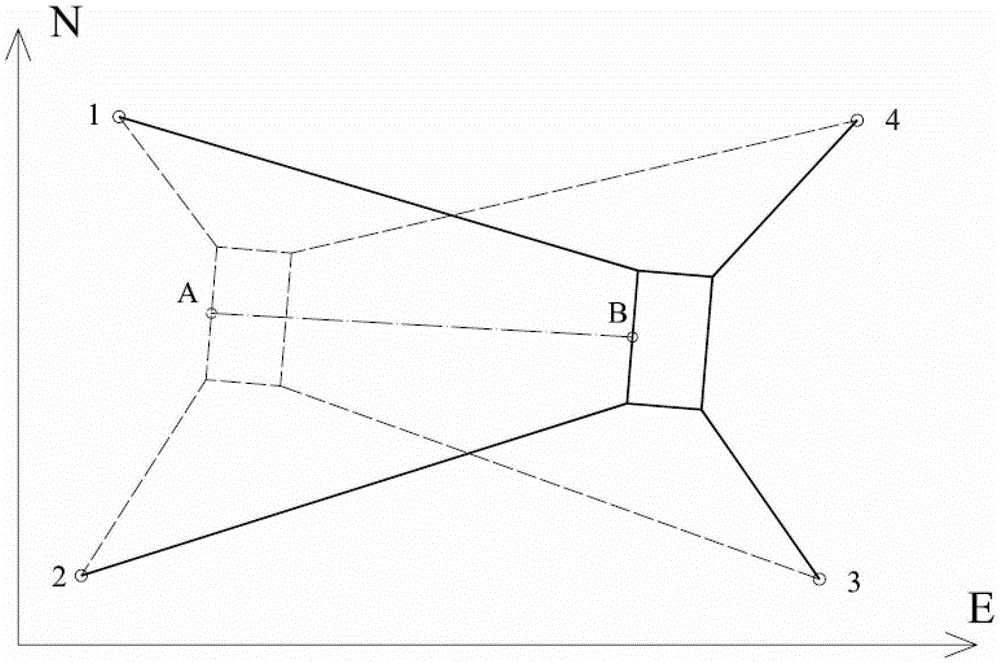
[0016] see Figure 1-Figure 2 , a non-self-propelled ship intelligent displacement system based on an adaptive algorithm, including a control unit 6 and a GPS module connected to the control unit, and also includes windlasses 51-54 fixed on the ship and windlasses 51 for controlling the windlasses respectively. -54 frequency converters 71-74, the frequency converters 71-74 are connected to the control unit 6, and the number of the windlasses is at least 2, which are respectively arranged at different positions on the deck of the ship, and each windlass is connected to an independent windlass through a cable respectively The anchor points 1-4 are connected, and the control unit 6 includes a central processing module and a construction drawing loading module connected with the central processing module, wherein:
[0017] The central processing module...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More