

7-DOF (degree of freedom) space manipulator ground microgravity hybrid simulation method
A space manipulator, manipulator technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of large floor space, complex system, insufficient gravity compensation accuracy, etc., to achieve small floor space, easy implementation, The simple effect of the agency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be further described below in conjunction with accompanying drawing.
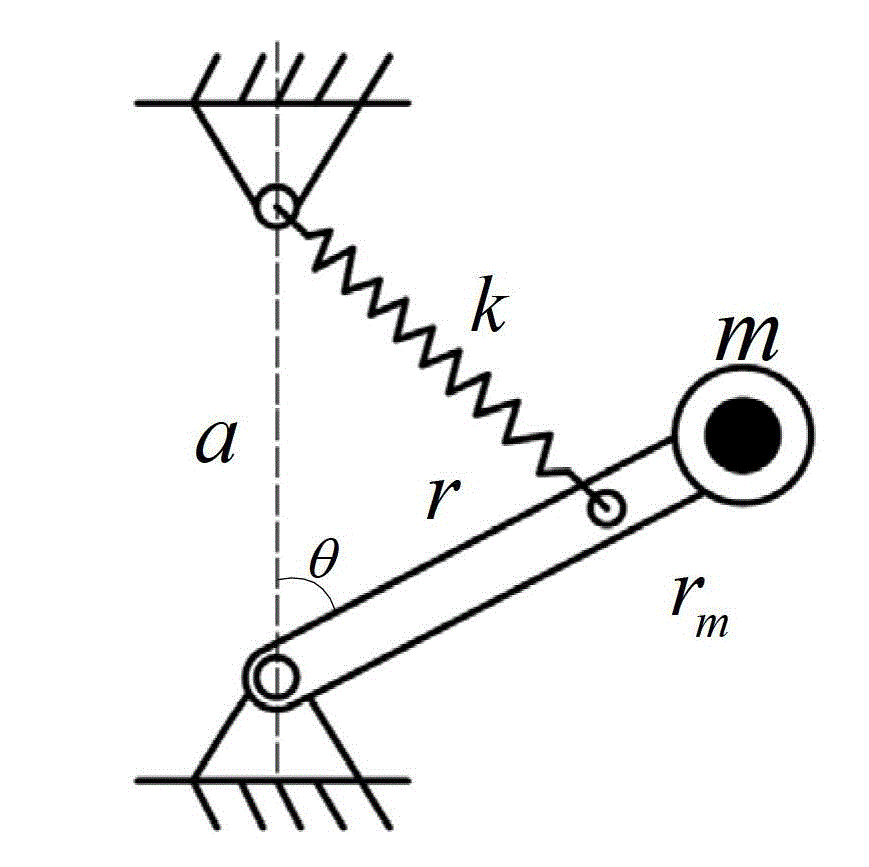
[0026] Step 1: If figure 1 The basic model of the static balance based on the spring is shown, and the principle of the static balance based on the spring is firstly explained.
[0027] When it is not affected by other external forces, it can be known from the Lagrange equation:
[0028] τ = d dt ( ∂ T ∂ θ · ) - ∂ T ∂ θ + ∂ V ∂ θ = 0 - - - ( 1 ) ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More