

Control method, equipment, system and construction machinery for multi-joint mechanical arm support
A robotic arm, multi-joint technology, applied in mechanically driven excavators/dredgers, mining equipment, cranes, etc., can solve the problems that the end of the multi-joint boom cannot be accurately reached and the operation efficiency is low.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
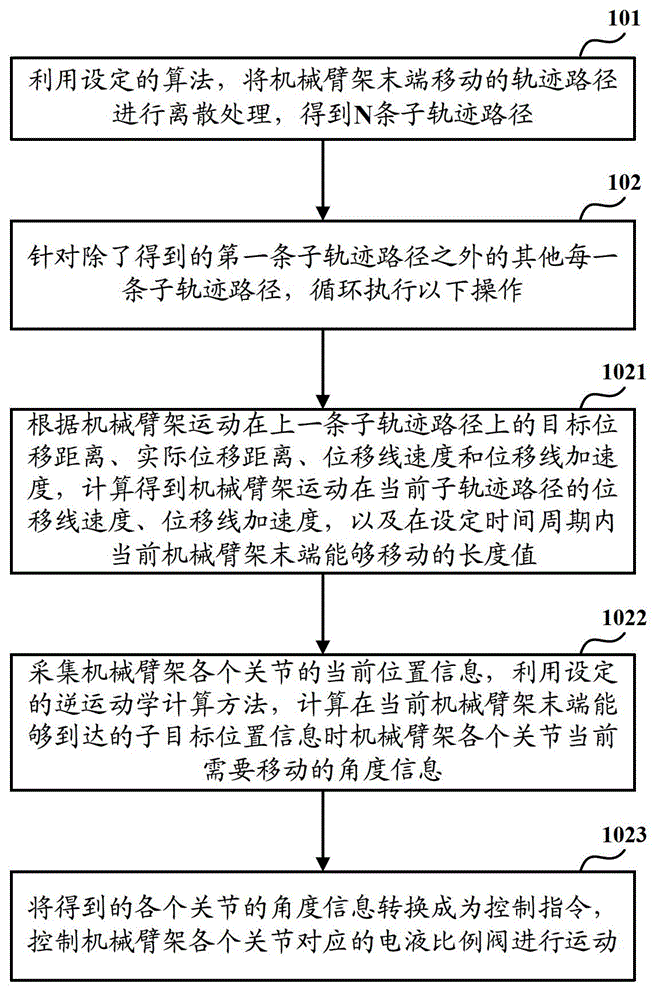
[0041] Such as figure 2 As shown, it is a flowchart of a control method of a multi-joint mechanical arm frame according to Embodiment 1 of the present invention, and the method includes:
[0042] Step 101: Divide the trajectory path of the end movement of the mechanical arm frame into N sub-trajectory paths by using the set method of simulating the end movement of the mechanical arm frame.
[0043] Wherein, N is a positive integer not less than 1.
[0044] In step 101, before the discrete operation is performed on the trajectory path of the movement of the end of the mechanical arm, the method further includes: determining the movement trajectory of the end of the mechanical arm.
[0045] Specifically, the method for determining the moving trajectory path of the end of the mechanical arm includes but is not limited to: determining according to the current position information of the end of the mechanical arm and the target position to which it moves.
[0046] After the trajec...
Embodiment 2
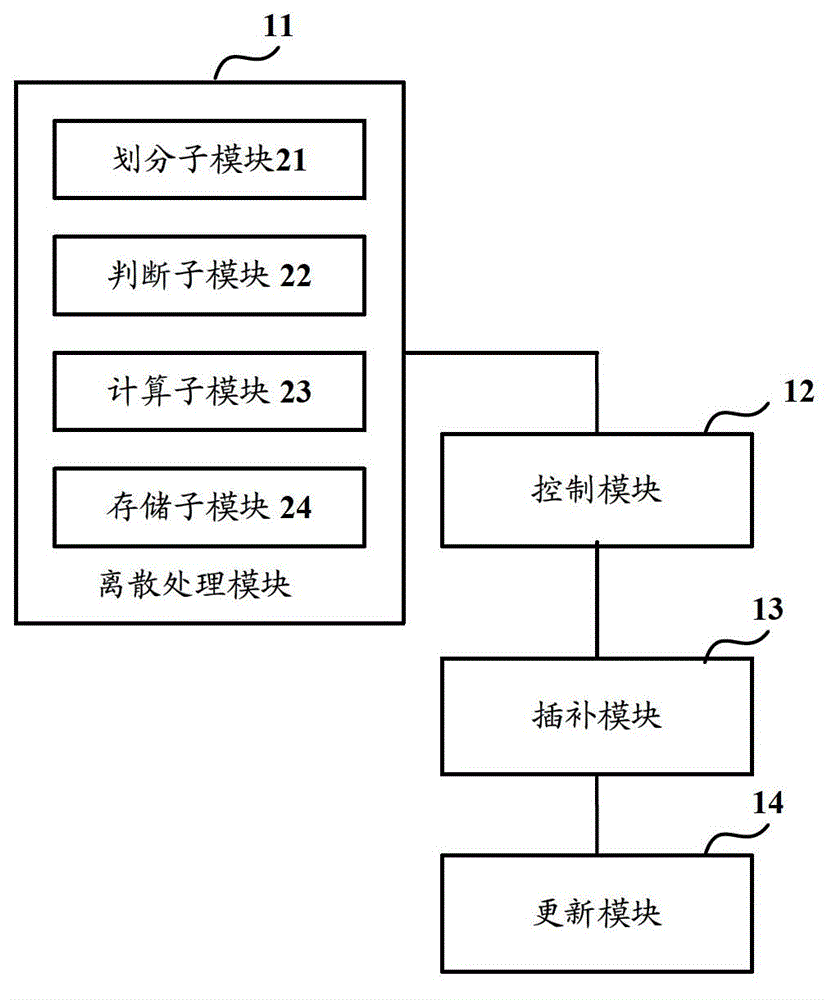
[0101] Such as image 3 As shown, it is a schematic structural diagram of a control device of a multi-joint mechanical arm frame according to Embodiment 2 of the present invention, the device includes: a discrete processing module 11 and a control module 12, wherein:
[0102] The discrete processing module 11 is used to divide the trajectory path of the end movement of the mechanical arm frame into N sub-trajectory paths by using the set method of simulating the end movement of the mechanical arm frame, where N is a positive integer not less than 1;
[0103] The control module 12 is configured to perform the following operations on each sub-track path except the obtained first sub-track path:
[0104] Calculate the displacement linear velocity, displacement linear acceleration and The length value that the end of the current robotic arm can move within the set time period;
[0105] Collect the current position information of each joint of the mechanical arm frame, and use th...
Embodiment 3
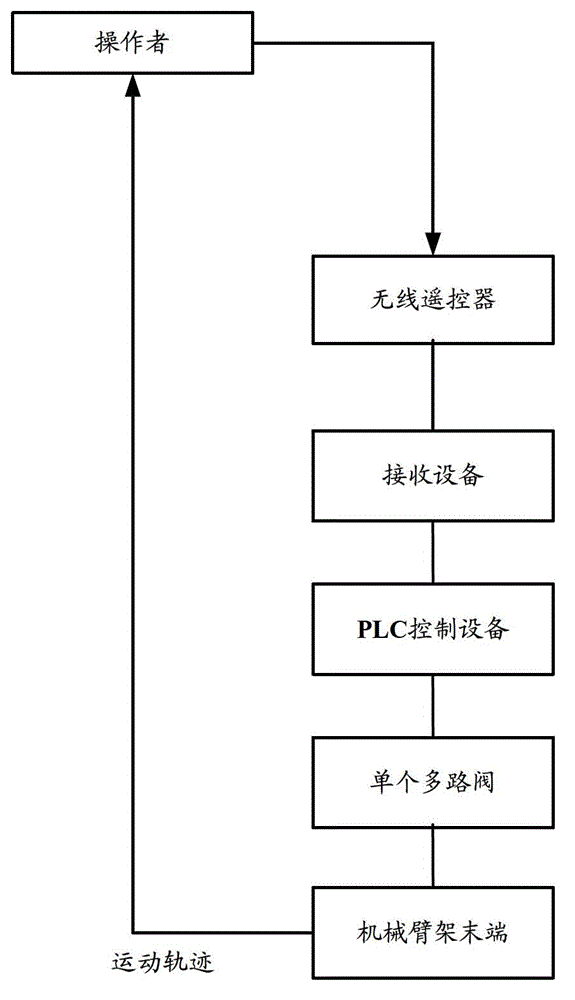
[0130] Such as Figure 4 As shown, it is a schematic structural diagram of a control system of a multi-joint mechanical arm frame according to Embodiment 3 of the present invention. The system includes: acquisition equipment 31, control equipment 32 and electro-hydraulic proportional valve 33, wherein:
[0131] The collecting device 31 is used to collect the current position information of each joint of the mechanical arm frame.
[0132] The control device 32 is used to divide the trajectory path of the end movement of the mechanical arm frame into N sub-trajectory paths by using the set method of simulating the end movement of the mechanical arm frame, where N is a positive integer not less than 1;
[0133] For each sub-trajectory path except the obtained first sub-trajectory path, the following operations are performed respectively: the target displacement distance, actual displacement distance, displacement linear velocity and Displacement linear acceleration, calculate th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More