Device and method for controlling planar three-freedom-degree flexible hinge parallel robot
A flexible hinge and control device technology, applied in the field of robotics, can solve problems such as being susceptible to external environmental interference, multiple inputs, nonlinearity, etc., and achieve the effects of strong information processing capabilities, fast system response, and easy operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be described in detail below in conjunction with the accompanying drawings.
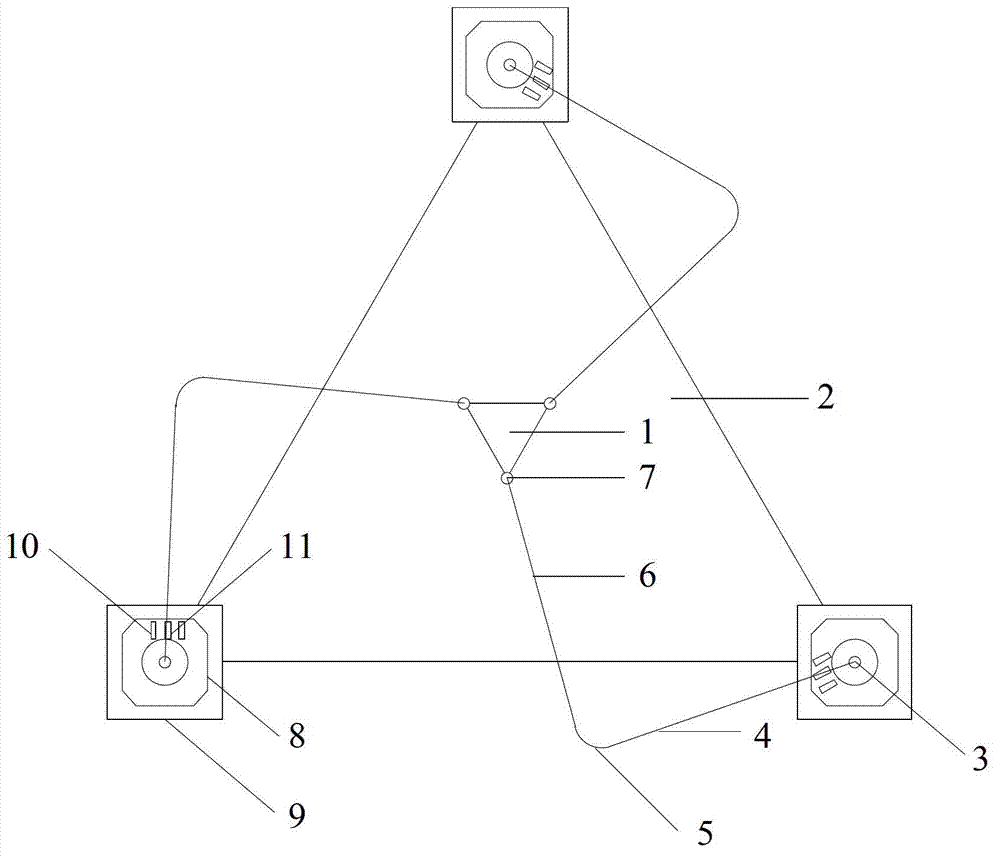
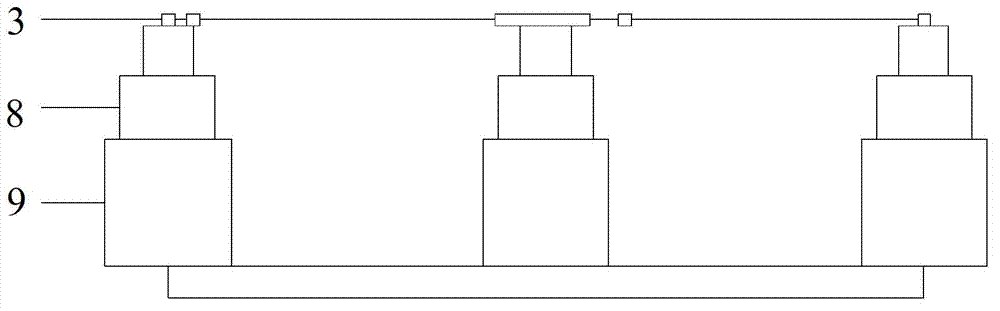
[0033] figure 1 , 2 Among them, the mechanical structure of the planar three-degree-of-freedom flexible hinge parallel robot includes: end effector 1, base 2, and three kinematic branches connected with end effector 1 and base 2 with the same structure and three sets of driving chains with the same structure part; in the motion branch chain, one end of the active rod 4 is connected with the driving pair 3, and the other end is connected with the driven rod 6 through the flexible hinge 5, and the driven rod 6 is connected with the end effector 1 through the rotating pair 7; the driving In the part, one end of the servo motor 9 is fixed on the base 2, the other end is connected to the reducer 8, and the other end of the reducer 8 is connected to the drive pair 3; a group of limit proximity sensors 10 are symmetrically installed on both sides of the output end of the a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More