

Man-machine interaction control method and application thereof
A technology of human-computer interaction and control method, which is applied in the field of human-computer interaction control and its application, and can solve problems such as inconvenient portability, difficult human-computer interaction, and many mechanical controls.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0099] Embodiment 1 A control method for human-computer interaction
[0100] A control method of human-computer interaction, which establishes "user micro-motion database" and "self-role virtual motion database"; and stipulates "action amplification rules" and "human-computer interaction rules".
[0101] The "user micro-action database" also includes "user permission micro-action scheme database".
[0102] 1. User micro-action database
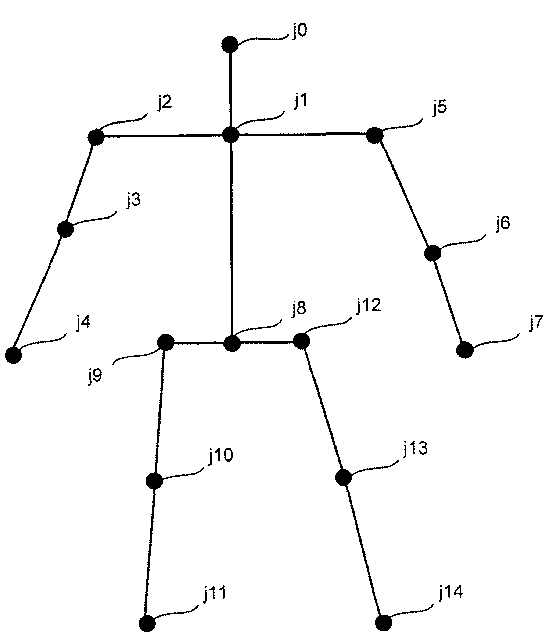
[0103] 1.1) Establish a database with keywords such as head, neck, waist, upper arm, lower arm, wide part, upper leg, lower leg, palm and sole; the purpose is to determine the active parts of the user's body that can control the actions of the self-character.
[0104] 1.2) Define the evaluation index for the range of motion of the active part, including: displacement, angle change value of adjacent joints, moving speed, shaking frequency, etc.; aiming at specifying the form of command issued by the active part.
[0105] 1.3) The upper limi...
Embodiment 2
[0205] Embodiment 2 A control method for human-computer interaction
[0206] Giving an ego character superpowers involves the following steps:
[0207] 1) Create a superpower virtual allowable action plan for the self-character in addition to amplifying the user's physical fitness;
[0208] 2) Track the user's allowable micro-movement changes, and determine the target of the virtual allowable action of the self-character's superpower;
[0209] 3) Evaluate the superpower function value of the self-character when implementing superpower virtual allowed actions, and make the affected target and other factors make morphological changes.
[0210] The morphological change described in this embodiment includes position, shape, state, and material change, wherein shape includes deformation, flow, and granular changes; state change includes: transition between gaseous, solid, and liquid states; position includes: Changes in motion conditions such as displacement, motion speed, and ...
Embodiment 3
[0213] Example 3: Application in Space Design or Observation of Space Samples
[0214] Include the following steps:
[0215] 1) 3D modeling for space design or space samples;
[0216] 2) Control the ego character to perform virtual actions within the space design or 3D modeling of the space sample.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More