

Algorithm for restoring wheel path based on road attributes and real-time road conditions
A technology of driving trajectory and real-time road conditions, applied in traffic control systems, instruments, traffic control systems of road vehicles, etc., can solve problems such as difficult to determine and restore the actual driving trajectory
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
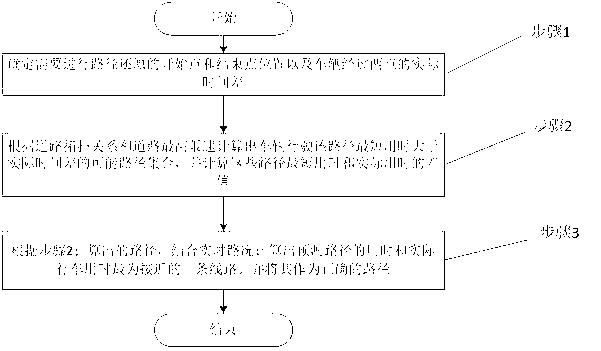
[0025] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
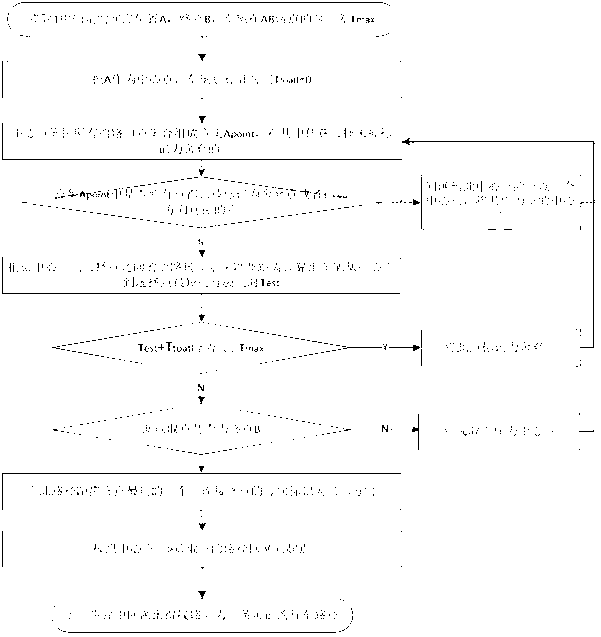
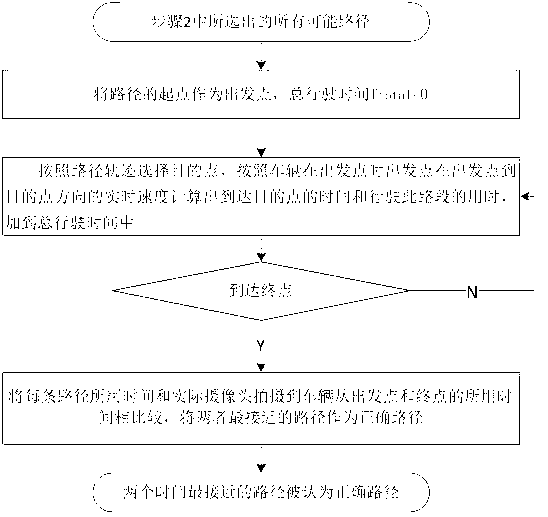
[0026] Roads in cities generally have a maximum speed limit. For example, it is stipulated in relevant laws and regulations: Motor vehicles on roads without speed limit signs and markings, if there is only one motor vehicle lane in the same direction, the maximum speed is 70 kilometers per hour. . We believe here that under normal circumstances, there is a 20% margin for the maximum speed limit, and we believe that the speed limit is The road section can have a maximum speed , if the distance passing through road A in a route is D Km, and the highest driving speed on road A is KM / H, then the shortest time the vehicle spends on road A is . According to the maximum speed limit of each road passed on the route and the distance traveled by the route on this road, the minimum time if the vehicle travels on this route can be calculated. Fir...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More