

Three-dimensional laser imaging system planar point cloud data triangularization processing method
A point cloud data and imaging system technology, applied in image data processing, 3D modeling, instruments, etc., can solve problems such as imperfect theory and algorithms, unsatisfactory model details, complex topological relationships of 3D scattered data points, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
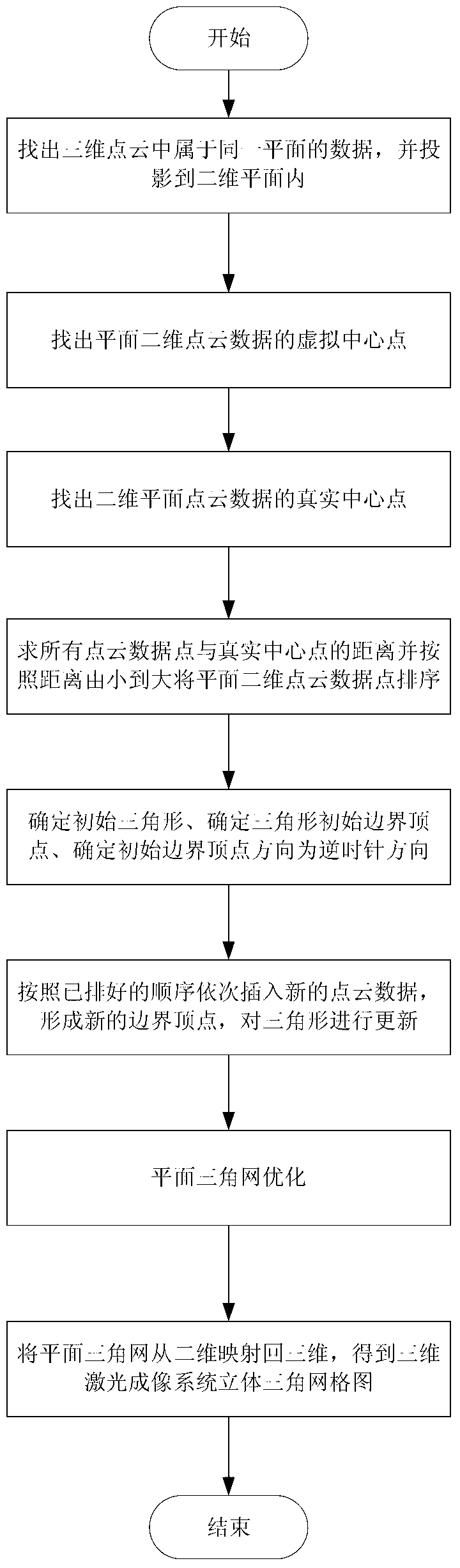
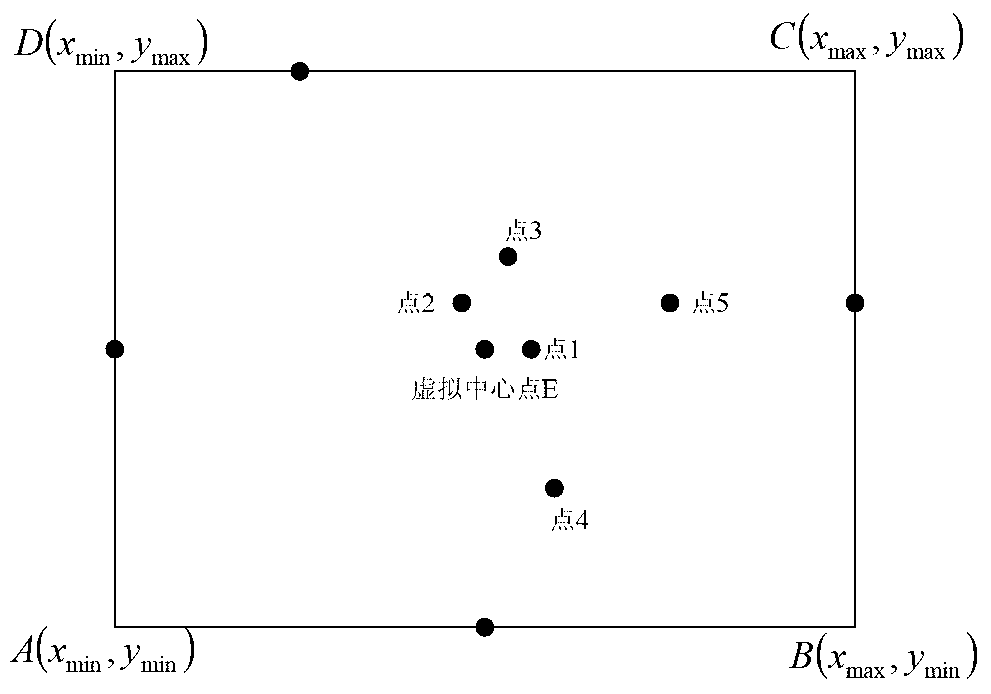
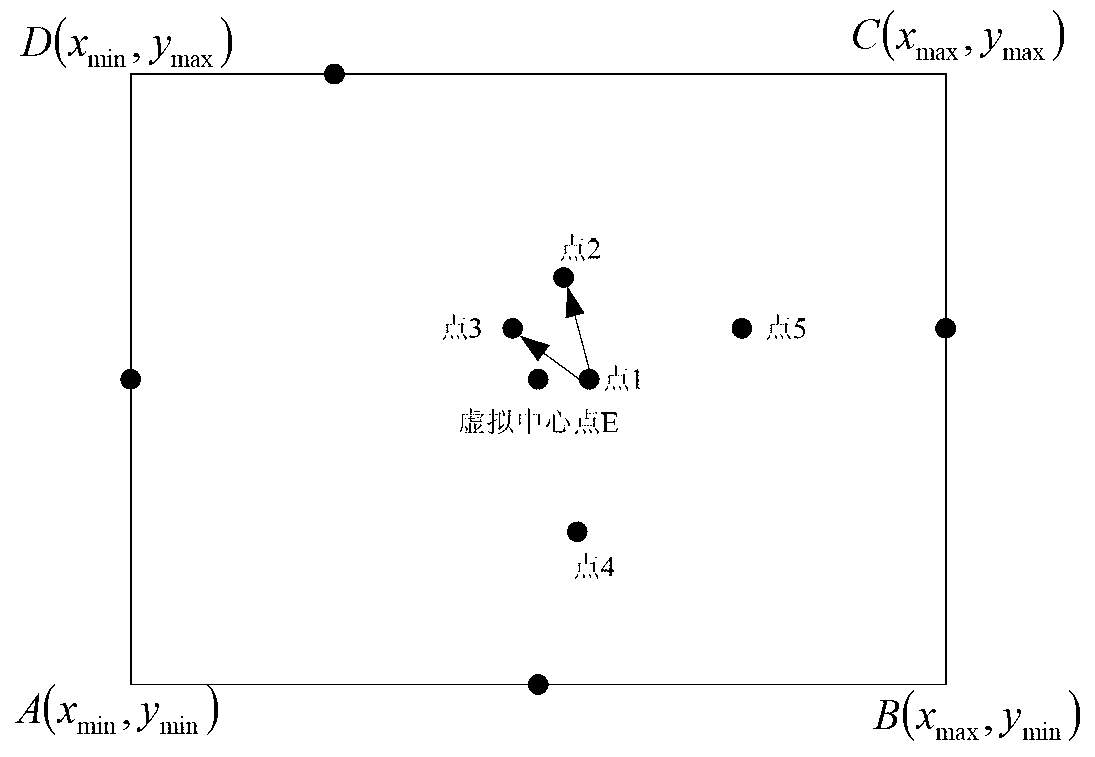
[0048] The realization principle of the present invention is: first obtain the three-dimensional point cloud data belonging to the same plane from the three-dimensional point cloud data scanned by the three-dimensional laser imaging system, and project the three-dimensional point cloud data of the same plane onto the two-dimensional plane to form a plane Two-dimensional point cloud data, calculate the virtual center point of the planar two-dimensional point cloud data, and then compare the distance between each data point and the virtual center point, take the point closest to the virtual center point as the real center point of the scattered data, and then compare For the distance between each discrete point and the real center point, the two-dimensional point cloud data is pre-sorted according to the rule of distance from small to large, and the initial triangle and initial boundary vertices are found, and then the initial boundary vertices are sorted counterclockwise. Insert...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More