

Composite transformation mobile robot combining elastic foot and wheel type motion mechanism
A mobile robot and motion mechanism technology, applied in the field of robotics, can solve the problems of reduced load capacity and weak strength of robots, and achieve the effects of increasing motion stability, strong load capacity, and avoiding bulky and heavy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be described in further detail below in conjunction with the accompanying drawings.
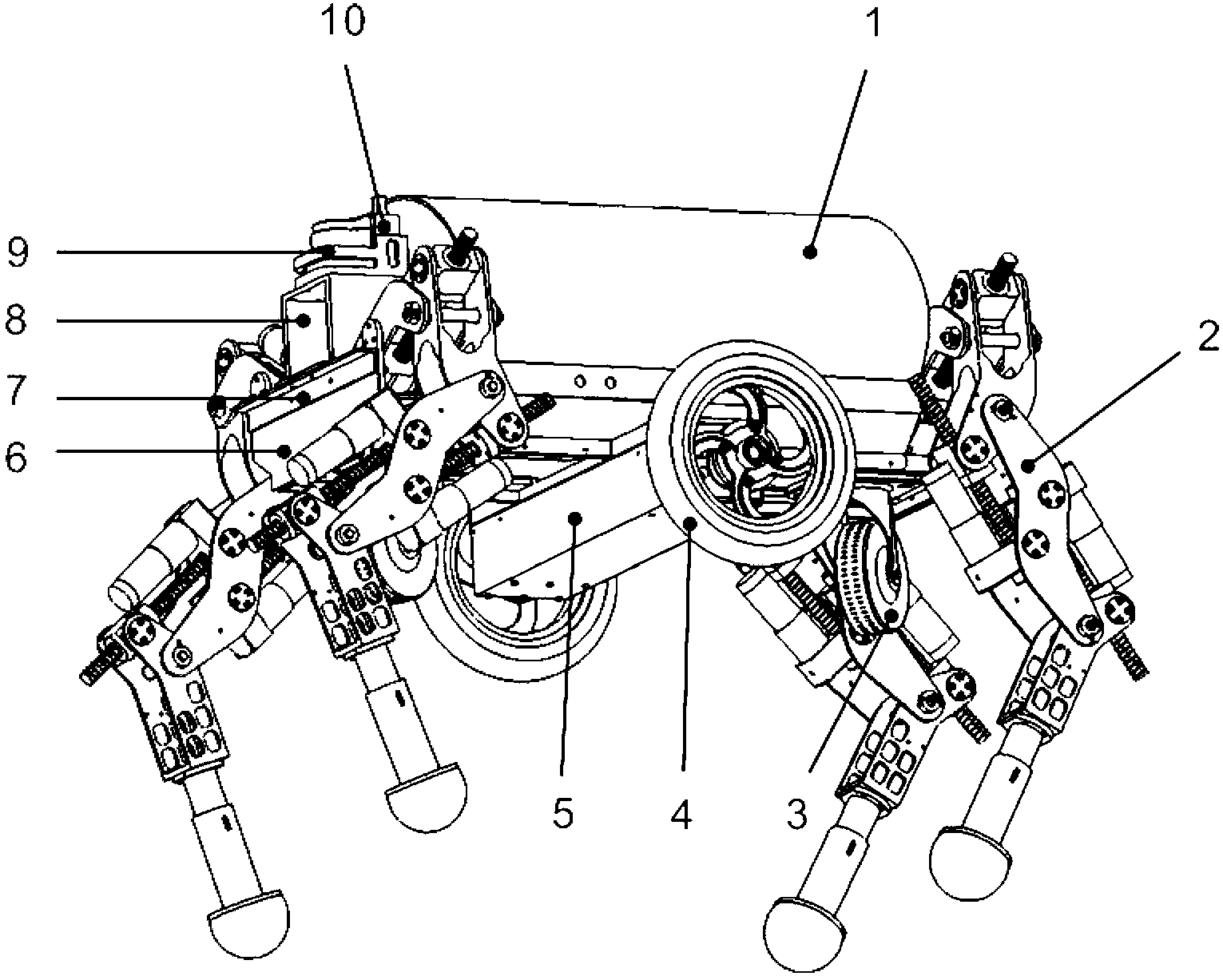
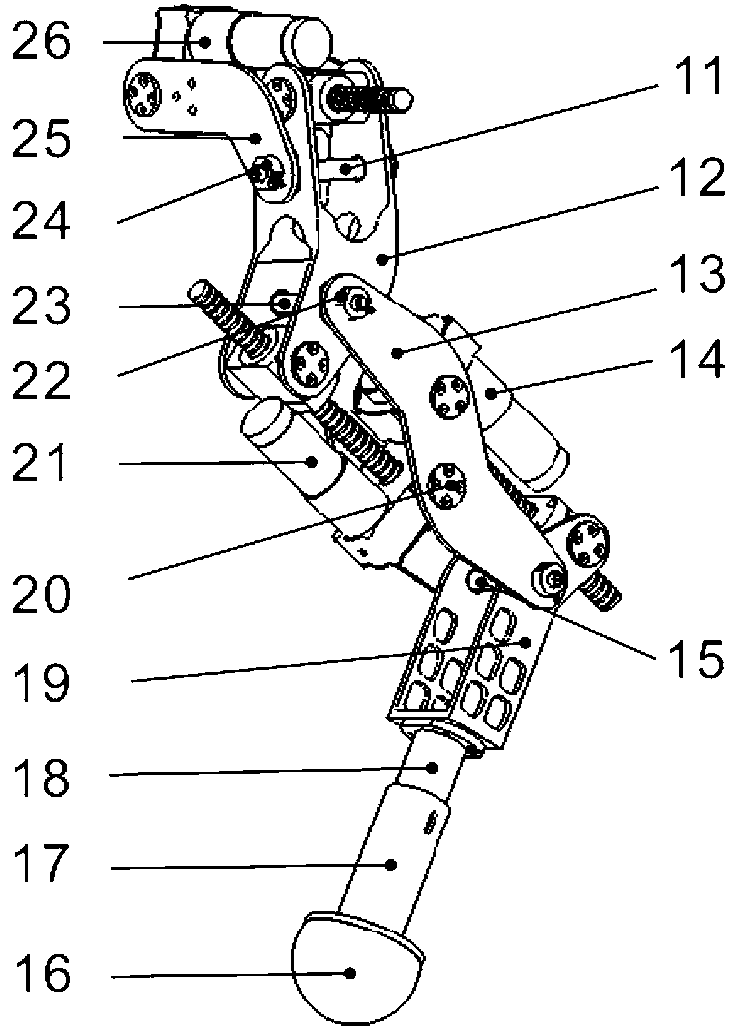
[0036] Such as figure 1 As shown, a composite deformation mobile robot combining elastic feet and wheeled motion mechanisms of the present invention is specifically a foot-wheel composite deformation mobile robot designed with a special composite scheme, and its mechanical structure adopts a composite mode independent of each other . In this embodiment, there are four modularly designed leg units 2, a driven wheel structural unit 3, a driving wheel drive module unit 4, a space frame body 7 carrying various types of sensors, control circuits, PCs and power supplies, and a sealed housing 1 and so on. The installation method of four modularly designed leg units and the space frame body 7 is as follows: figure 2 The hip joint support 25 and the space frame body 7 are fixedly connected by bolts, and the four legs are arranged elbow-to-elbow (knee joints face o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More