

Bionic skin three-dimensional force touch perception device and measuring method thereof
A tactile perception and measurement method technology, applied in the field of bionic skin 3D force tactile perception devices, can solve the problems of inaccurate measurement results of 3D force sensors, and achieve convenient standardized preparation, easy storage and use, and improved measurement efficiency and accuracy. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
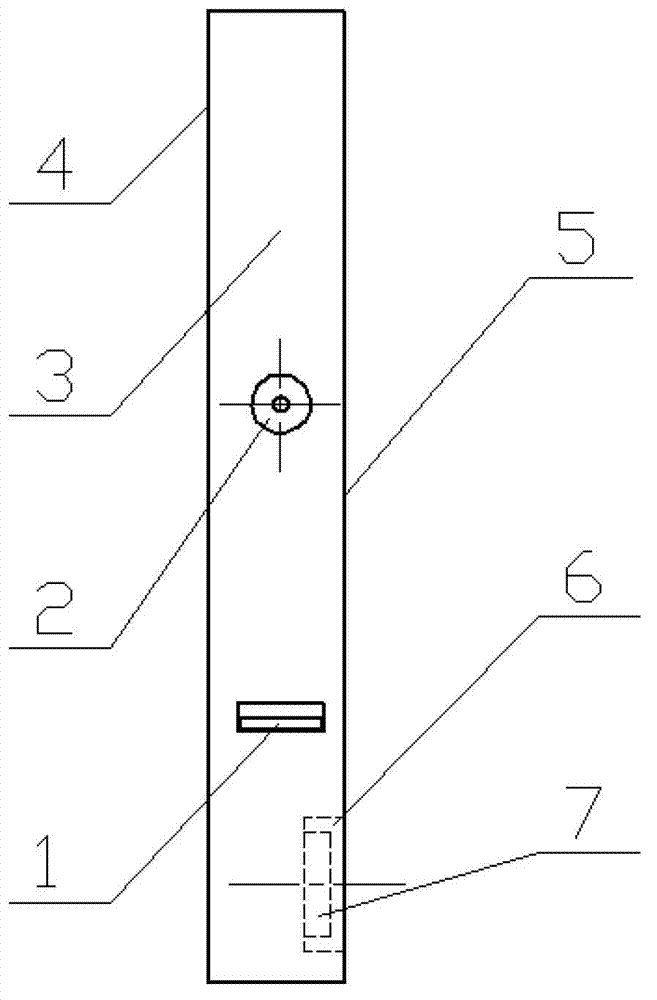
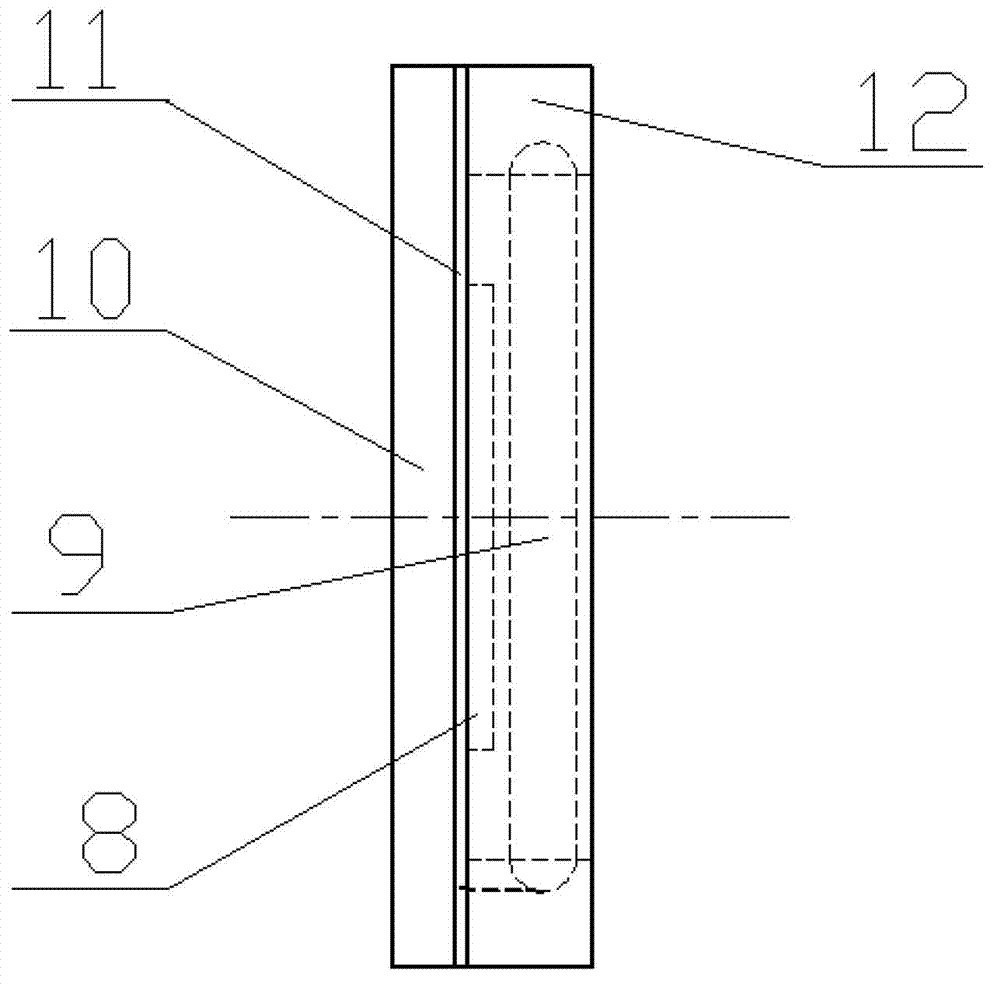
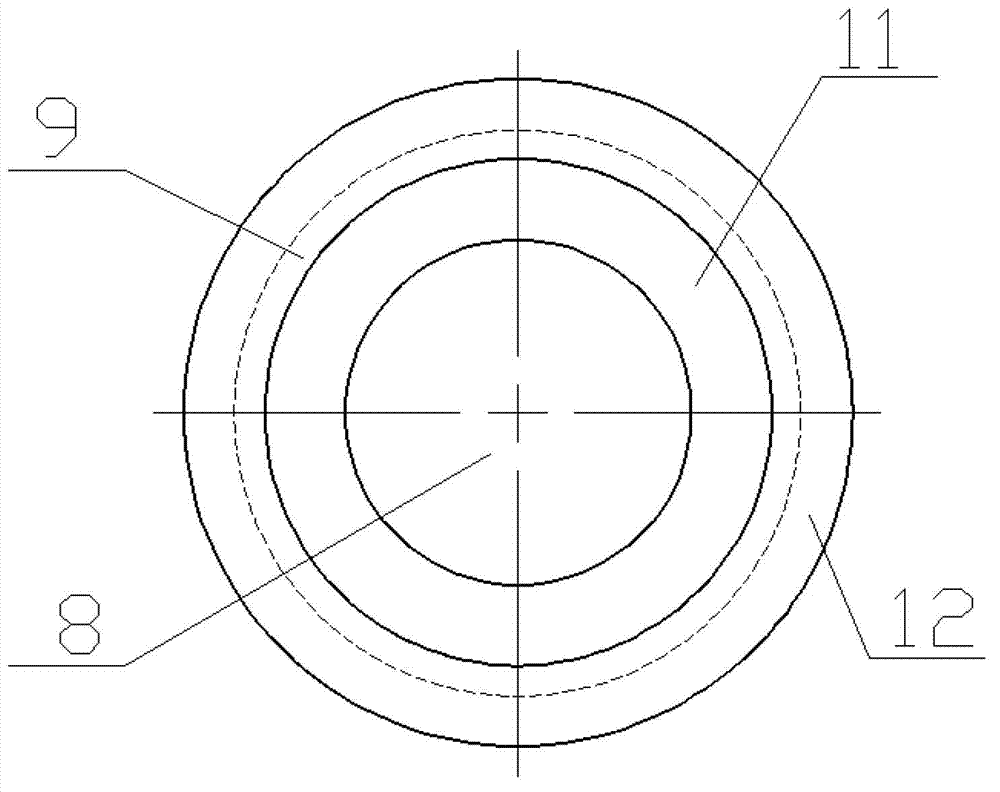
[0024]In the figure, the bionic skin three-dimensional force tactile sensing device includes a shell, a unit upper layer 12, a unit base layer 15 and a circuit module; There is an inflatable device 2, a power supply box 6 is fixed on the bottom of the shell, and a button battery 7 is arranged in the power supply box 6; a bionic skin surface 10 is arranged on the outermost side of the upper layer 12 of the unit, and its elasticity and toughness are close to human skin. The bionic skin surface layer 10 of 12 is the same colloidal material, and the outside of the unit upper layer 12 is provided with an electromagnetic isolation layer 11, which can shield electromagnetic interference in the space. The electromagnetic isolation layers 11 of all units are the same material, and the inner side of the unit upper layer 12 is provided with Pit, there is embedded conductive sheet 8 in the pit, conductive sheet 8 has larger contact area, and the inner side wall of unit upper layer 12 is pr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More