Unlock instant, AI-driven research and patent intelligence for your innovation.
Underwater acoustic locating method based on equivalent sound velocity
What is Al technical title?
Al technical title is built by PatSnap Al team. It summarizes the technical point description of the patent document.
A technology of underwater acoustics and positioning methods, applied in positioning, measuring devices, instruments, etc., can solve problems such as positioning errors of sound propagation models
Active Publication Date: 2013-09-25
SHANGHAI JIAO TONG UNIV
View PDF0 Cites 17 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
Therefore, even if there is a very accurate underwater synchronization method to ensure that the underwater sensor nodes can be synchronized underwater, and the measurement error of the sensor is very small, the wrong estimation of the sound propagation model will still cause a large error in positioning
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
[0039] An underwater acoustic positioning method based on equivalent sound velocity, comprising the following steps:
[0040] Step 1: Initialize, set the initial position p of the underwater target source m (x m ,y m ,z m ), randomly place n sensor receivers underwater, i.e. receiving nodes, and record their positions as p 1 (x 1 ,y 1 ,z 1 ), p 2 (x 2 ,y 2 ,z 2 ),...,p n (x n ,y n ,z n );
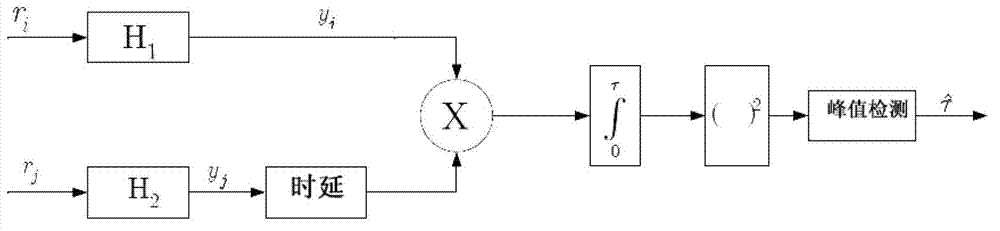
[0041] Step 2: Measurement of Time Difference of Arrival (TDoA), the calculation of Time Difference of Arrival adopts the generalized cross-correlation (GCC) method, the target source is known to emit sound wave s(t), and the sound wavesignal received by the i-th receiving point is defined as: ri (t)=h i (t)×s(t)+n i (t), the acoustic wavesignal received by the jth receiving point is: r j (t)=h j (t)×s(t-τ)+n j (t), where n i (t) and n j (t) represent the additive noise of the sound waves received by the i-th receiving point and the j-th receiving point, assuming n i...
Embodiment 2
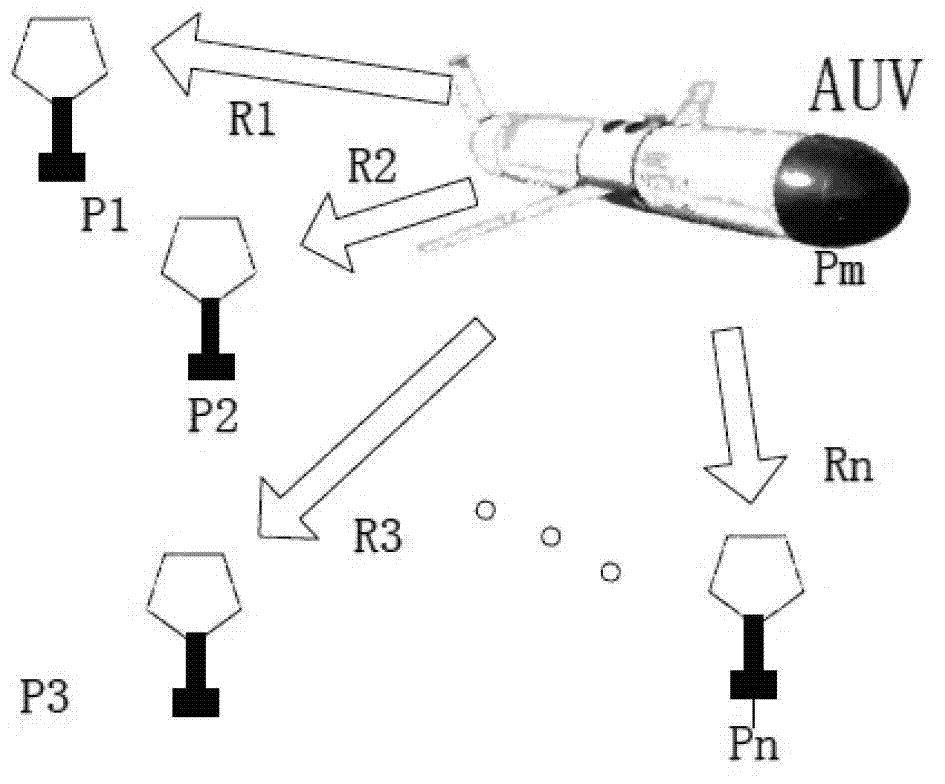
[0075] Such as figure 1 As shown, taking the underwater vehicle AUV as an example, an underwater acoustic positioning method based on the equivalent sound velocity includes the following steps:
[0076] Step 1: Arrangement of sensor receiving nodes and parameter statistics. Set the initial state of the embodiment: the initial position of the underwater vehicle AUV is p m =[1000, 1000, 10] T , the positions of the four underwater receiving nodes are: p 1 =[0,0,0] T ,p 2 =[2000, 2000, 5] T ,p 3 =[1000, 0, 100] T ,p 4 =[0, 1000, 100] T , during most of the voyage time, the underwater vehicle moves along a straight line, and the speed of the AUV in this embodiment is taken as v m ==[-20, 10, 1] T m / s, the negative direction indicates the increase of depth.
[0077] Step 2: Measurement of Time Difference of Arrival (TDoA). pass figure 2 In the process shown, multiplication, averaging, and maximizing the output, the arrival time difference of the two signals can be ca...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention relates to an underwater acoustic locating method based on equivalent sound velocity. The underwater acoustic locating method is characterized by including the following steps of step1, initialization, specifically setting an initial position of an underwater target source, and placing n sensors and receivers underwater at random, step 2, measuring time difference of arrival, step 3, computing the equivalent sound velocity, and step 4, locating the target source through a Kalman filter so as to reduce influences of background noise and improve underwater locating accuracy. Compared with the prior art, the underwater acoustic locating method based on the equivalent sound velocity has the advantages of being capable of achieving synchronous three-dimensional locating and real-time velocity computation, small in locating error, high in accuracy and the like.
Description
technical field [0001] The invention relates to the field of underwater acoustic positioning, in particular to an underwater acoustic positioning method based on equivalent sound velocity. Background technique [0002] Accurate underwater positioning is very important for many applications of underwater sensor networks, such as underwater precise navigation, marine resource exploitation, tracking marine life, and monitoring environmental safety, etc. In order to obtain more meaningful data from underwater sensor nodes and autonomous underwater vehicles (AUVs) in underwater sensor networks, more accurate underwater positioning system solutions are needed. [0003] However, the positioning of the underwater environment is different from the positioning of the land. The existing positioning methods of underwater vehicles can be roughly divided into three categories: acoustic positioning based on underwater sensor networks, matching positioning based on terrain information, and ...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.

 Login to View More
Login to View More  Login to View More
Login to View More