

UAV high resolution image geometric correction method based on error compensation
A technology of error compensation and geometric correction, applied in the field of geometric correction of unmanned aerial vehicle (UAV) high-resolution remote sensing images, can solve the problems of difficulty in meeting the real-time requirements of the UAV ground control station, inconvenient operation, and low real-time performance , to achieve high real-time requirements, improve flexibility, and improve work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
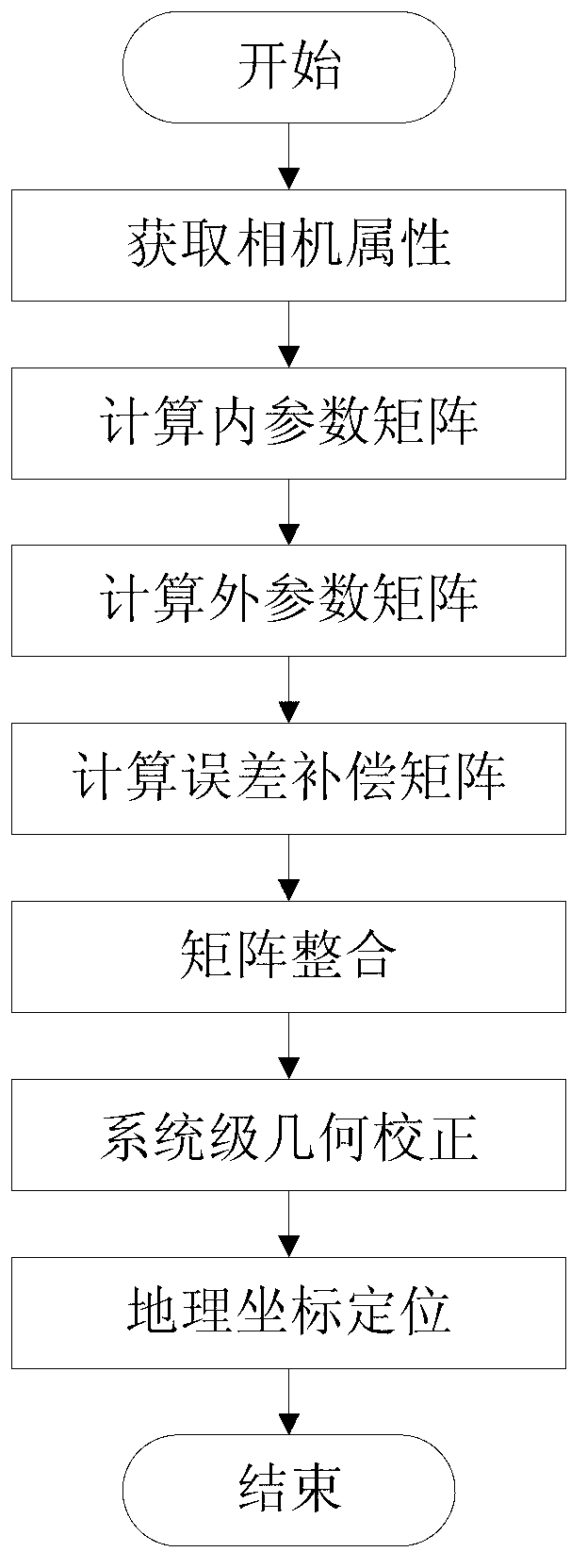
[0043] The specific implementation method of the present invention will be described in detail below in conjunction with the accompanying drawings.
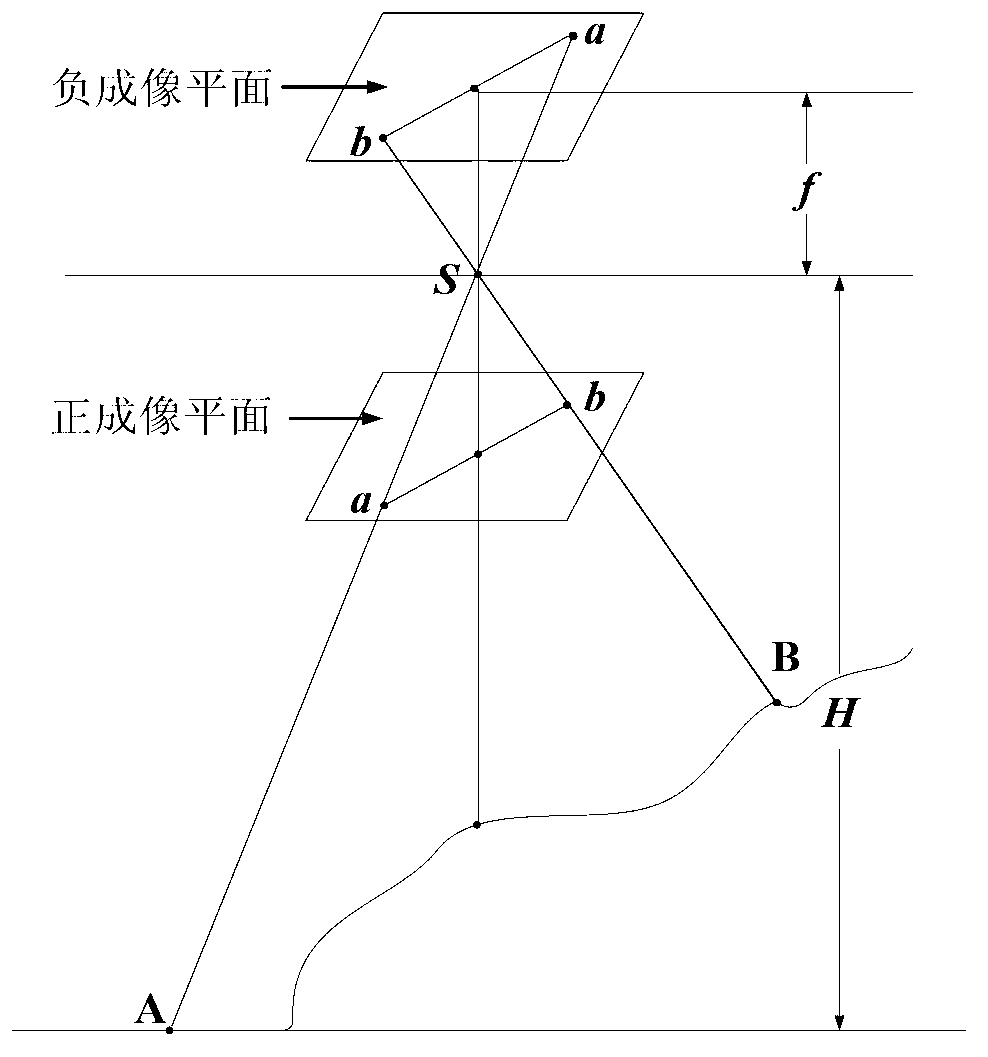
[0044] The present invention takes the pinhole camera model as the research object, comprehensively considers the factors that cause the distortion of the remote sensing image of the UAV, determines the solution for the geometric correction of the remote sensing image based on the global perspective transformation, and solves the problem of the geographical coordinates of the distorted image after geometric correction. positioning problem.
[0045] The invention is a geometric correction method for high-resolution UAV remote sensing images. On the basis of comprehensive consideration of internal orientation factors and external orientation factors, the system-level geometric correction is carried out by introducing an error compensation mechanism, which greatly improves the accuracy of algorithm correction. . In addition, the pr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More