

X-ray imaging robot and mechanical arm thereof
An X-ray and robot technology, applied in the field of medical devices, can solve the problems of inconvenient operation, no driving links for joints, inflexible movement, etc., and achieve the effect of large activity space, high flexibility, and reduced inertia
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
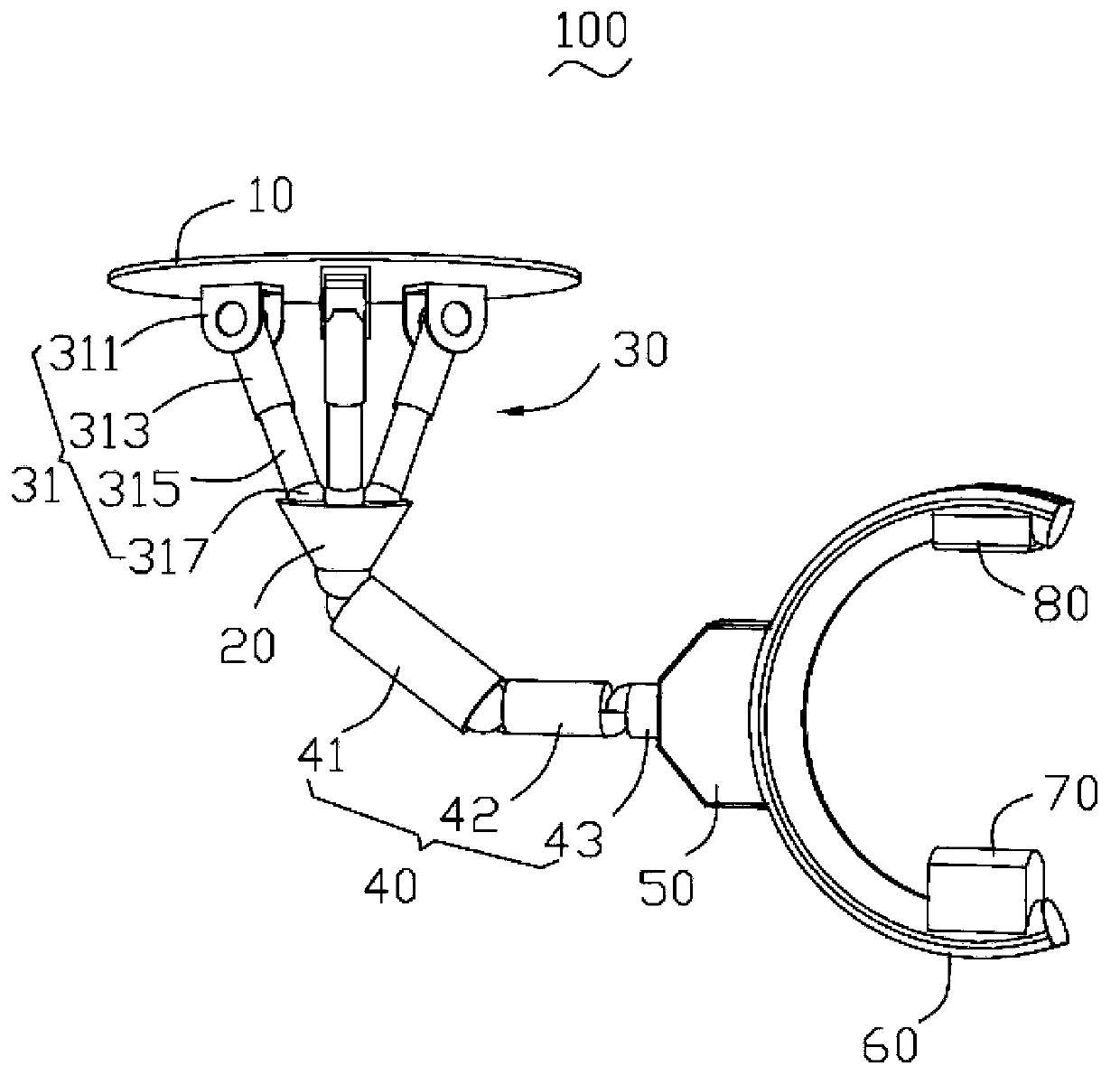
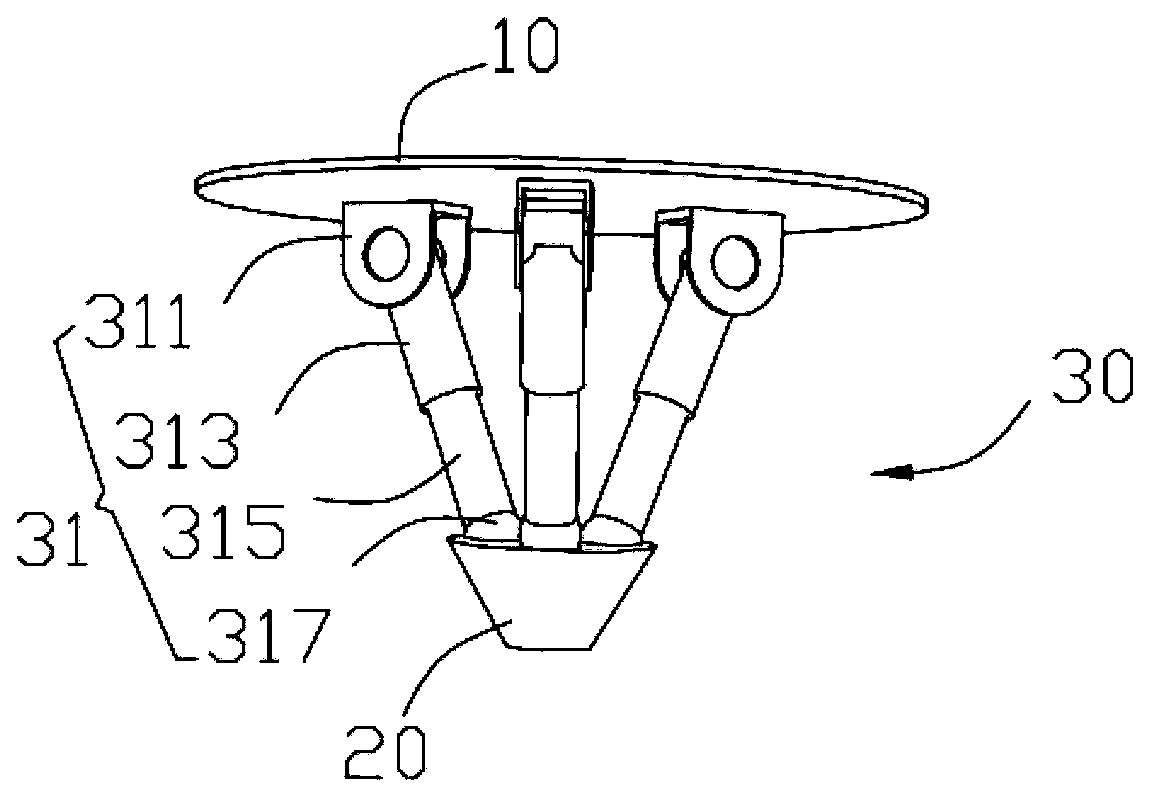
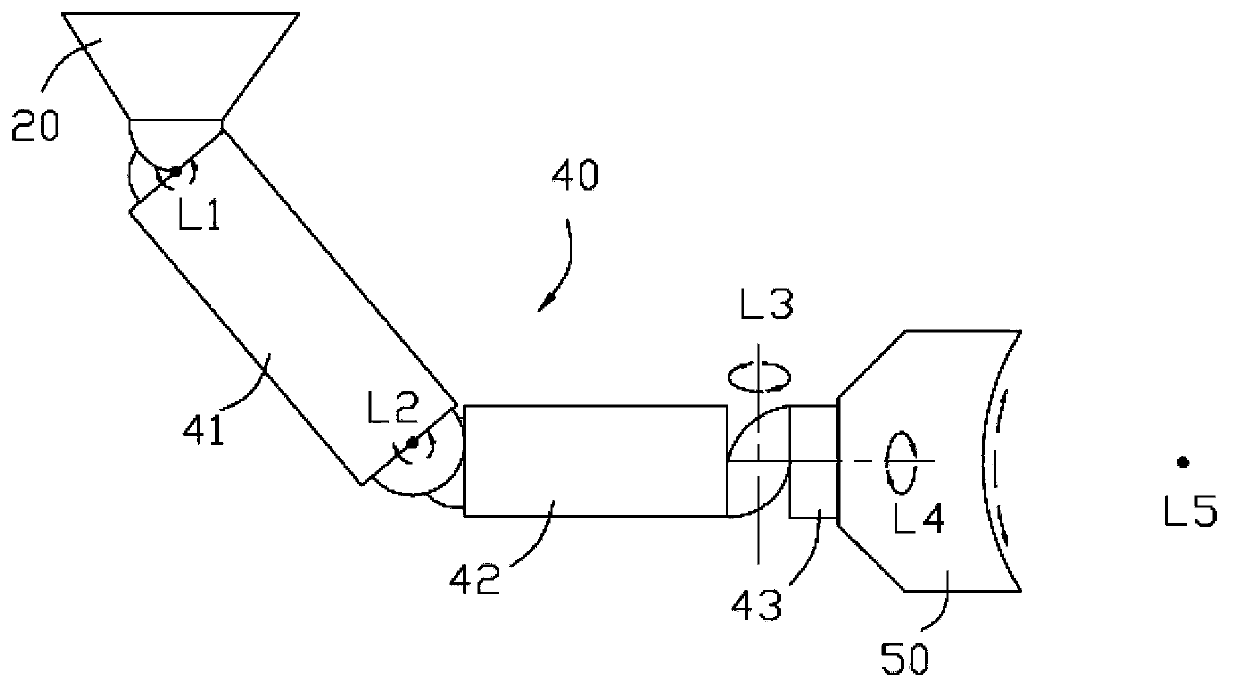
[0033] see figure 1 , a preferred embodiment of the present invention provides an X-ray imaging robot 100, which has multiple degrees of freedom and is used for three-dimensional imaging during surgery. The X-ray imaging robot includes a fixed platform 10, a moving platform 20, a A parallel mechanism 30 , a series mechanism 40 , a bracket 50 , a C-shaped track 60 , an X-ray source 70 and an image detector 80 .
[0034] The fixed platform 10 is used to fix the X-ray imaging robot 100. It can be understood that, according to the specific use of the X-ray imaging robot 100, the fixed platform 10 can be fixed on the ceiling, the ground, the wall or other machines. on the stand of the table or device. In this embodiment, the fixed platform 10 is a flat plate structure.
[0035] The moving platform 20 has one translational degree of free...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More