

A speed plus specific force matching transfer alignment method
A technology for transmitting alignment and speed, applied to navigation, measuring devices, instruments, etc. through speed/acceleration measurement, to achieve fast speed, high precision, and improve navigation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
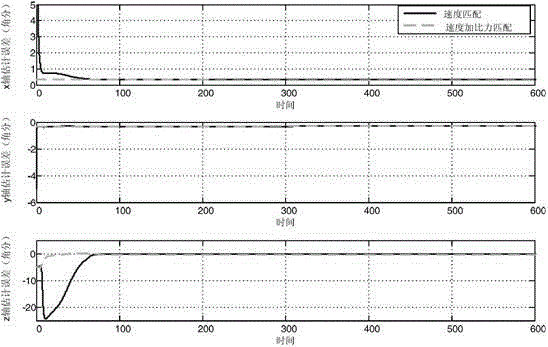
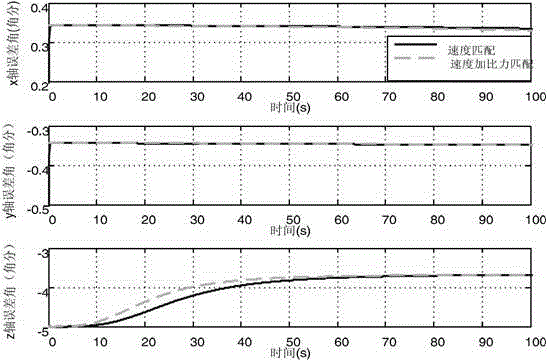
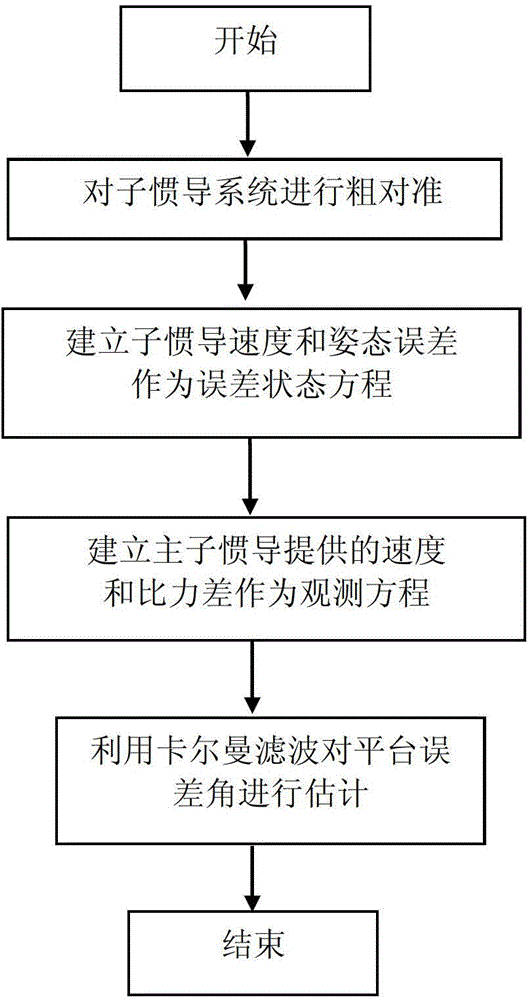
[0051] Such as image 3 , Figure 4 As shown, under the following initial conditions, the estimation of the transfer alignment and the estimation error are simulated, and the simulation results are analyzed and compared.
[0052] Initial conditions:
[0053] 1) Assuming that there is no error in the main inertial navigation, the error of the lever arm effect has been fully compensated;
[0054] 2) The initial position of the carrier: longitude 117°, latitude 39°. The initial attitude angles of the carrier (pitch, roll, heading) are: 0°, 0°, 45°; the initial error angle of the sub-inertial navigation platform is ψx =5′,ψ y =5′,ψ z =5';
[0055] 3) The constant value drift of the sub-inertial navigation gyroscope is 0.01(°) / h, and the random drift noise is 0.001(°) / h; the constant value zero bias of the accelerometer is 1×10 -4 g, the random bias noise is 1×10 -5 g;
[0056] 4) The initial value of the state estimation is 0; the initial variance matrix P 0 The parameter...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More