

Method and device for sensing walking gait of strength enhanced power exoskeleton
An exoskeleton, enhanced technology, used in medical science, artificial legs, prostheses, etc., can solve the problems of poor human-machine coupling motion comfort, inability to adjust the balance of the center of gravity of the system, obstacles of human limbs and mechanical structures, etc. Portable speed, easy to follow, to achieve the effect of follow-up
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
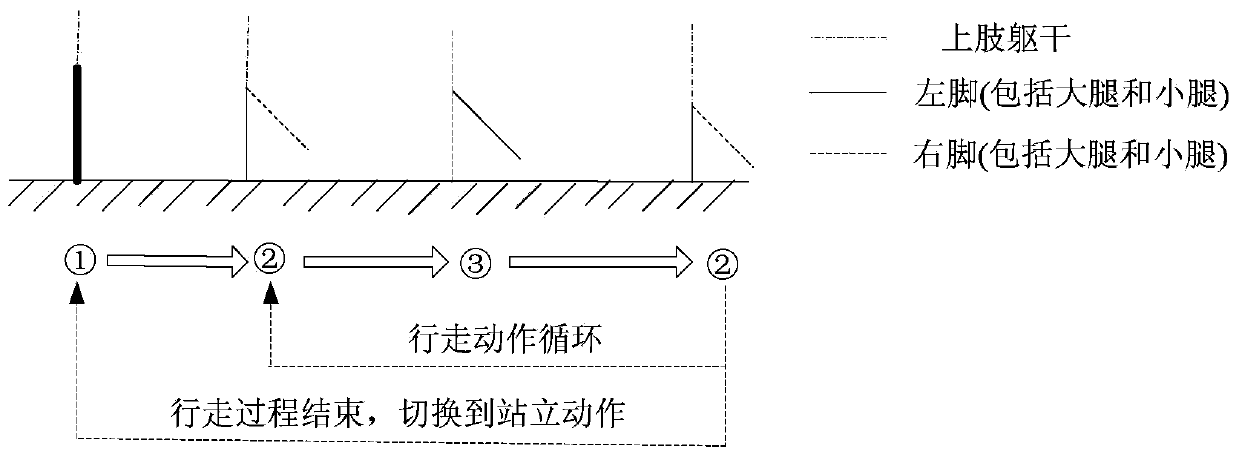
[0050] The lower extremity exoskeleton sensing method proposed by the present invention can also normally ensure the correct gait sensing and hydraulic control of the exoskeleton when the sensor is abnormal. The specific implementation is as follows:
[0051] ⑴ Normal condition of all sensors:
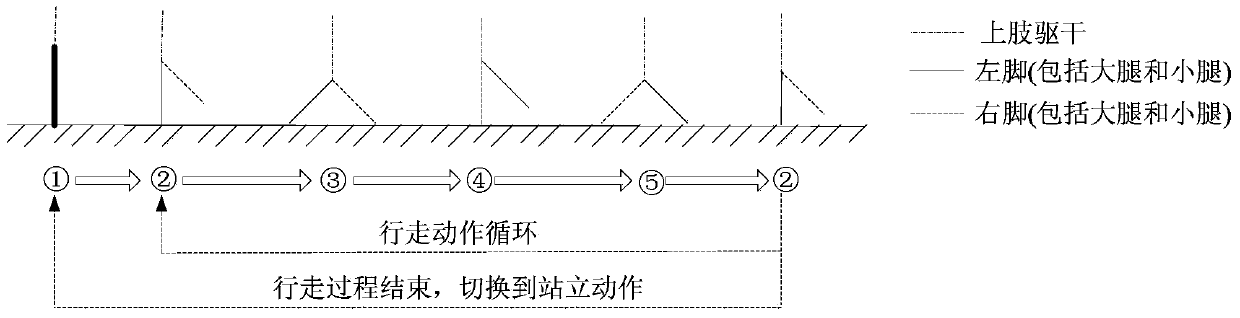
[0052] According to attached Figure 4 The given C4.5 decision tree algorithm judges the man-machine to carry five gait sub-phase switching processes, and performs control task scheduling, which is expressed as follows:
[0053]
[0054] is the control command of the left leg and right leg servo valve, expressed as:
[0055] I ctrl l = k p × ( θ kl exp - θ kl ) + k i × ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More