

High-accuracy position control method for serial robot
A control method and robot technology, applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., can solve the problems of fragile servo motors, large control energy, large torque and speed jumps, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] In order to make the objectives, technical solutions and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
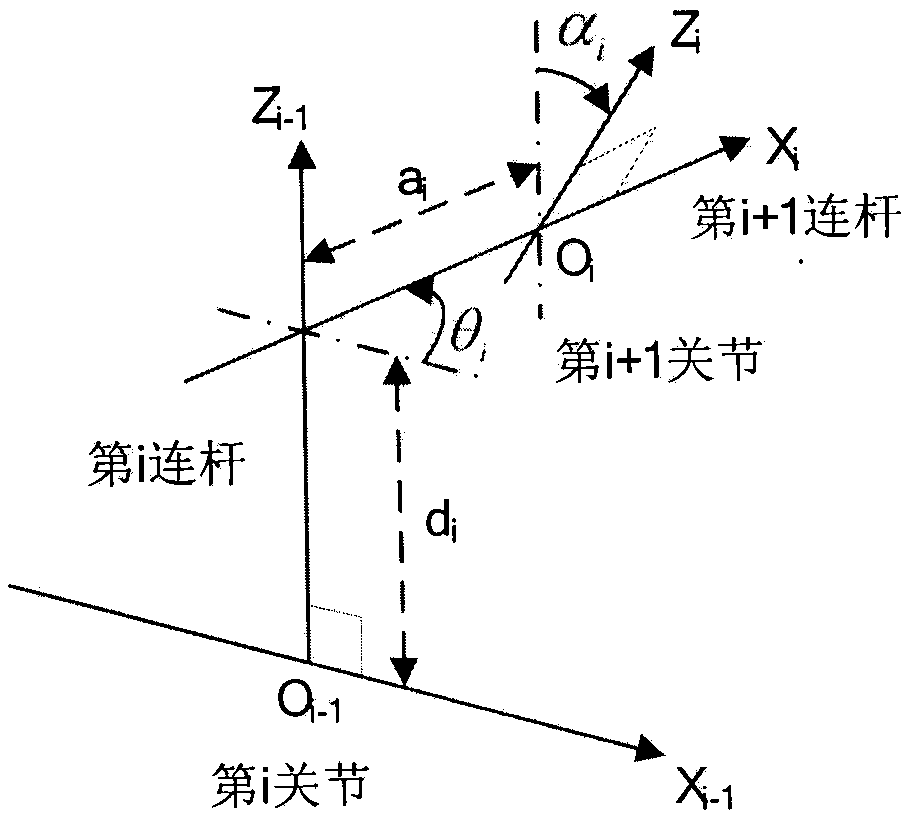
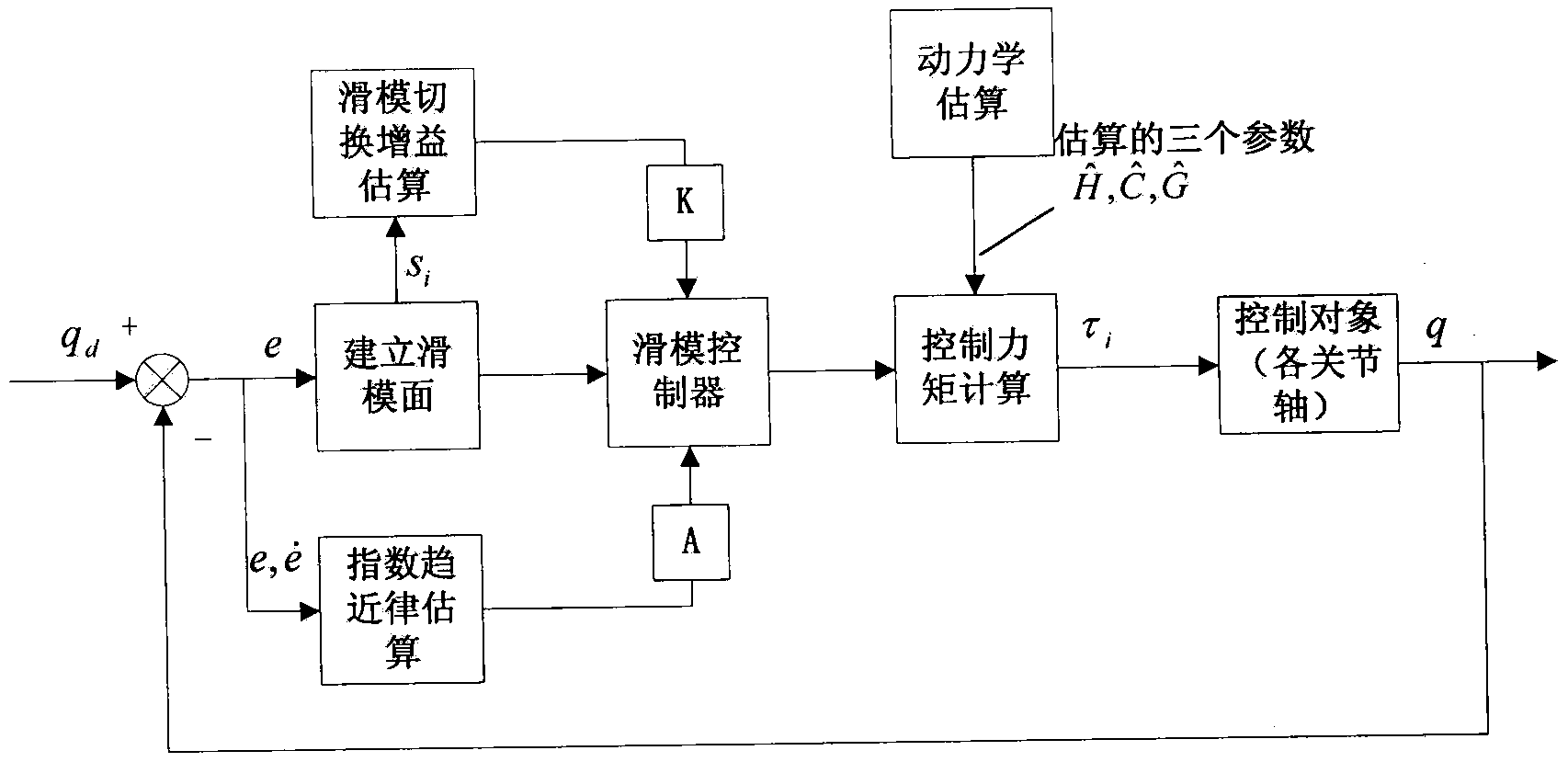
[0027] The basic idea of the present invention is to provide an improved robot control method: it does not need to know the specific mathematical model of the controlled object; and it has strong robustness and high tracking accuracy; and it improves the initial pose due to a large range Torque jump and speed jump caused by deviation. The present invention first models the robot to estimate its dynamic model, and adopts a sliding mode nonlinear control method based on the calculation torque method to ensure strong robustness in the control; the robot sliding mode control will have chattering phenomenon, so the original The invention introduces the exponential approach law to effectively eliminate the chattering proble...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More