

Tail end structure of multipurpose manipulator
A manipulator and mechanical technology, applied in the field of robotics, can solve the problems of low popularity, monotonous function, simple structure, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0077] The present invention will be described in further detail below in conjunction with the embodiments and accompanying drawings, but the embodiments of the present invention are not limited thereto.
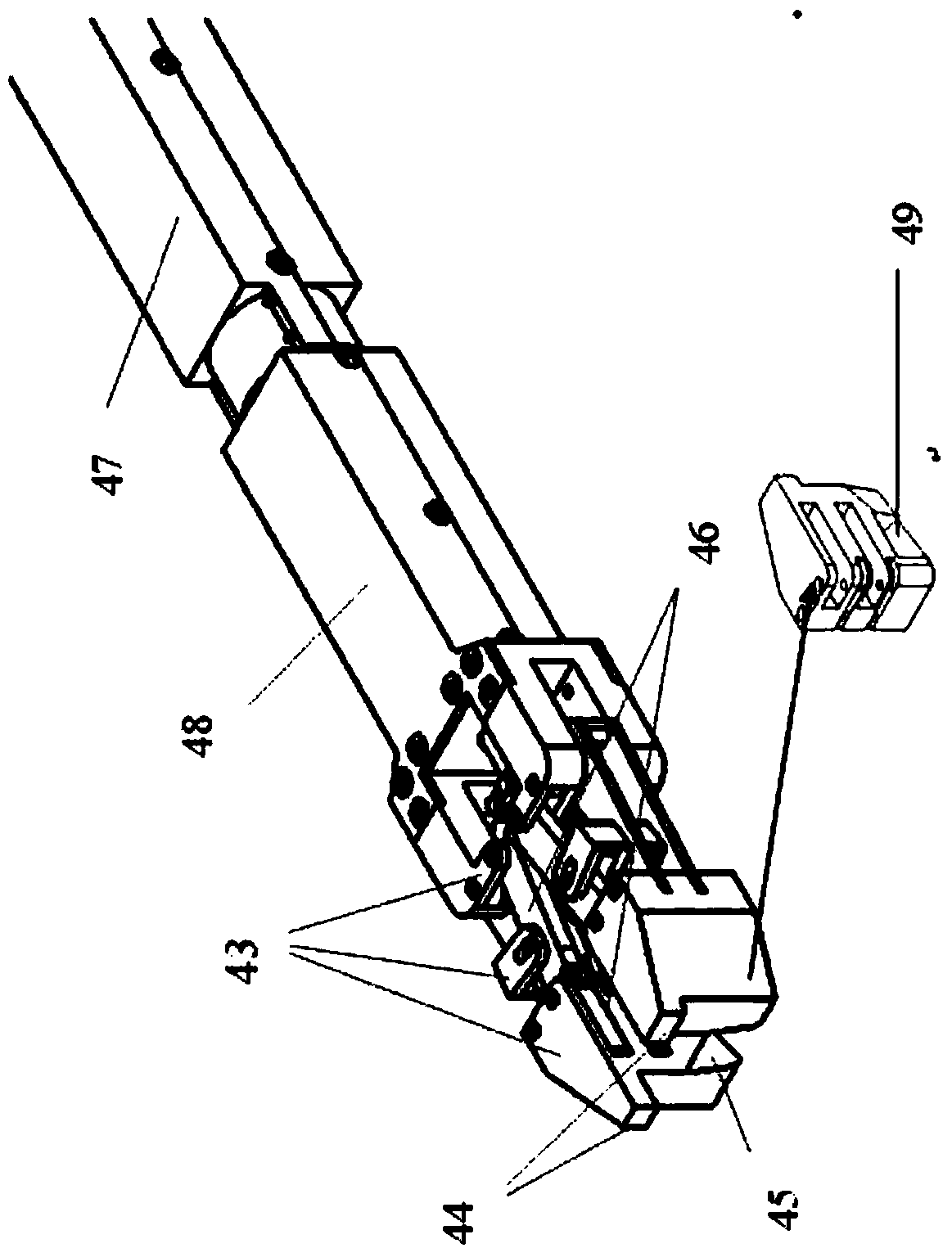
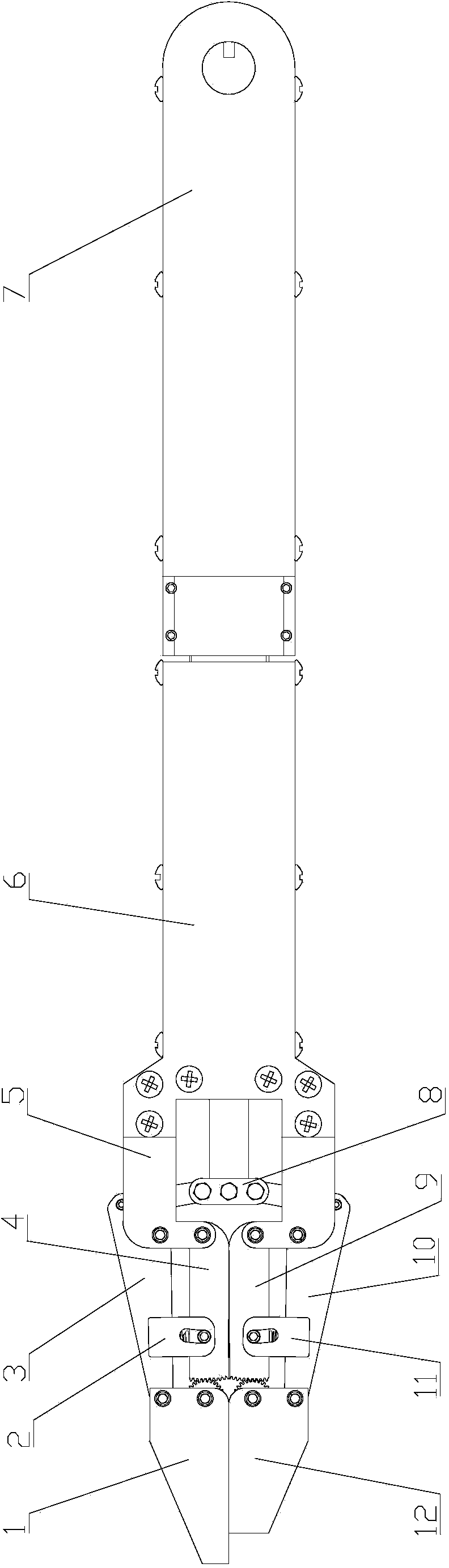
[0078] Such as figure 1 , the present invention is a terminal structure of a multipurpose manipulator, comprising a gripping manipulator basic framework 43, a terminal knuckle boss 44, a terminal knuckle hooked end 45, an adaptive bending structure 46, a forearm 47, a mechanical wrist (48 ) and the terminal knuckle groove 49, the clamping type manipulator basic structure 43 is fixed on the mechanical wrist 48 with 90 o countersunk head screws, the driving of the long finger and the short finger is controlled by the motor through the ball screw pair, and the terminal finger The knuckle boss 44 is derived from the first end phalanx 1 and the second end phalanx 12, and the hooked end 45 of the end phalanx is derived from the first end phalanx 1 and the second end phalanx 12. Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More