Method and system for cooperatively locating heterogeneous network based on WLAN and WSN
A heterogeneous network and collaborative positioning technology, applied in the field of communication, can solve the problems that the reliability and stability are greatly affected by environmental factors, and the positioning accuracy of WSN is not high, so as to achieve the effects of improving anti-interference ability, fast and accurate positioning, and reducing costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be further elaborated below in conjunction with the accompanying drawings and specific embodiments.
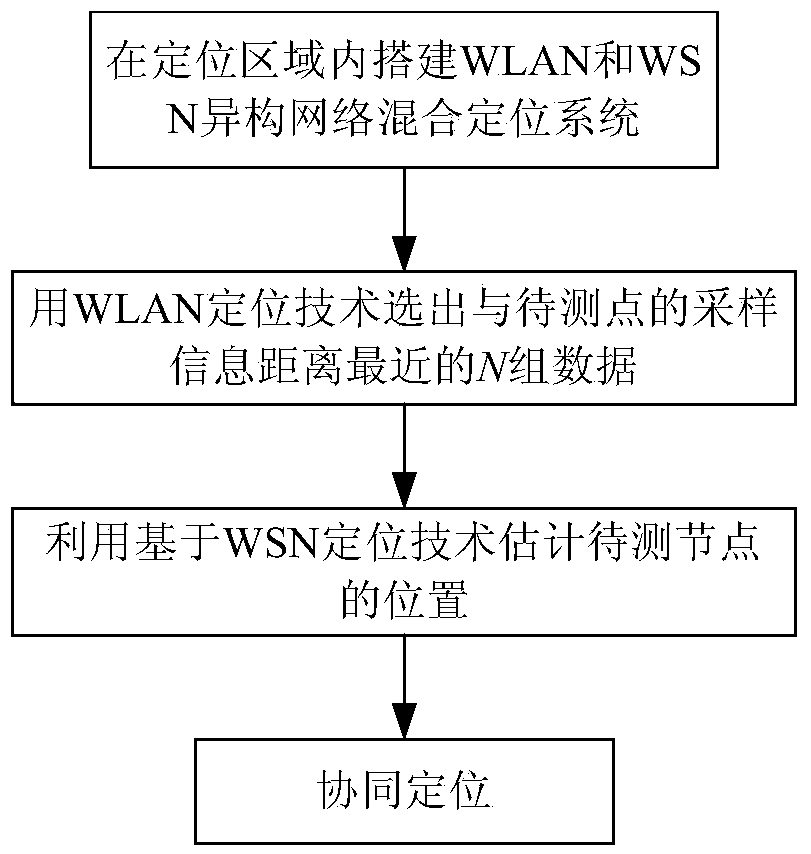
[0037] like figure 1 Shown is a flow chart of a heterogeneous network co-location method based on WLAN and WSN according to an embodiment of the present invention, which specifically includes the following steps:
[0038] A. Build a hybrid positioning system in the positioning area:
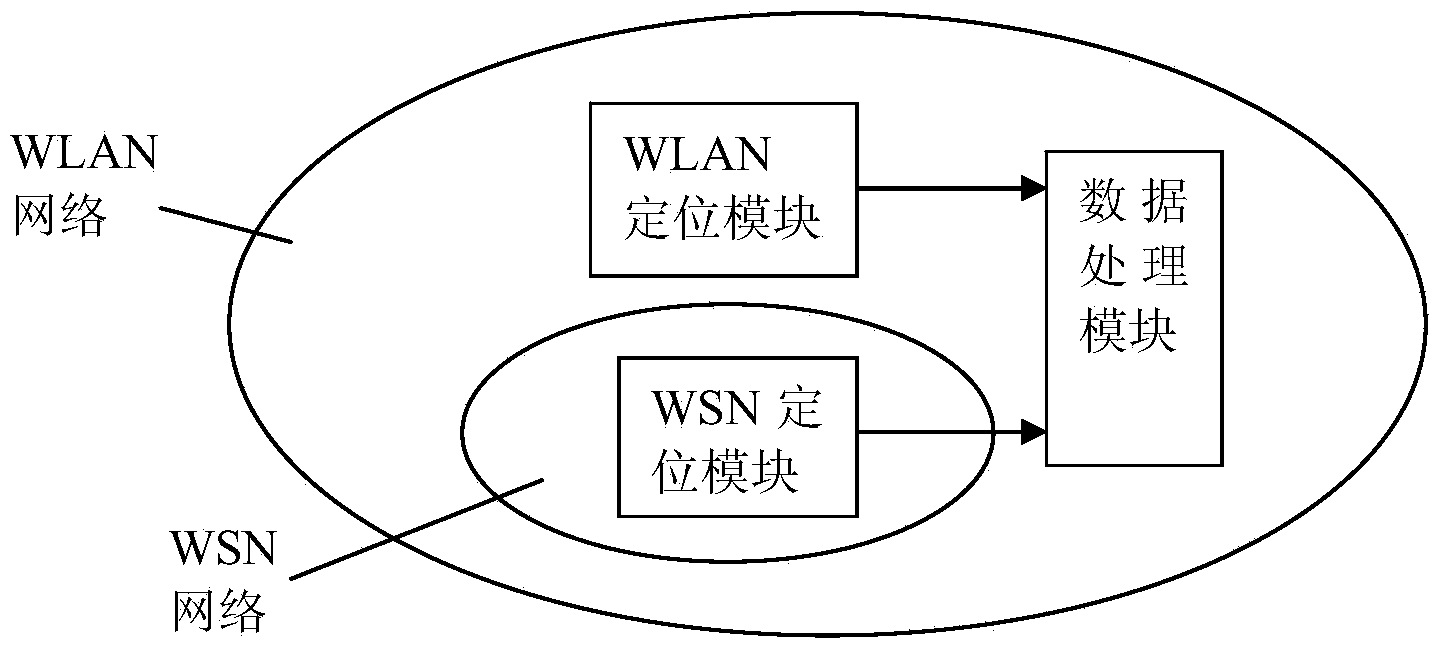
[0039] Set the wireless access point AP in the positioning area to build a wireless local area network WLAN; at the same time build a wireless sensor network WSN in the positioning area; In general, only 4 AP signals can be received. In actual operation and application, the existing WLAN network or WSN network can also be used without rebuilding the WLAN network or WSN network.
[0040] B. Use WLAN positioning technology to estimate the position of the node to be tested:
[0041] In the constructed WLAN network, the off-line data collection is carried out for ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



