

Welding robot based on rectangular coordinate system
A technology of welding robot and Cartesian coordinate system, which is applied in the direction of welding equipment, auxiliary welding equipment, welding/cutting auxiliary equipment, etc., can solve the problems of high manufacturing cost, poor versatility, and complex structure, so as to reduce construction cost, facilitate placement, beautiful layout effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The following describes the present invention in detail with reference to the drawings and embodiments:
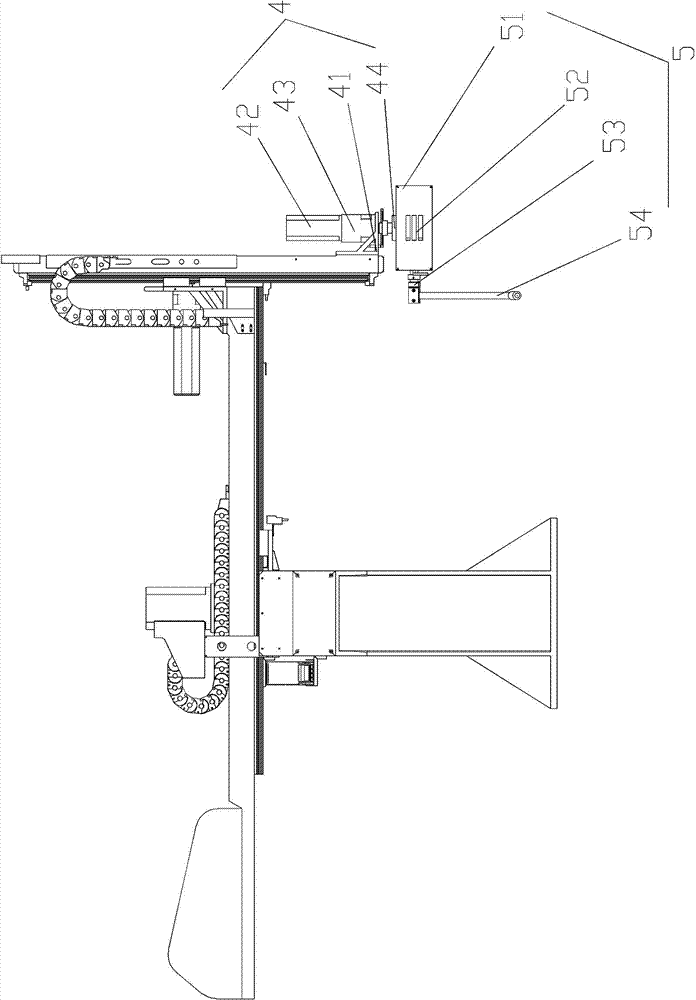
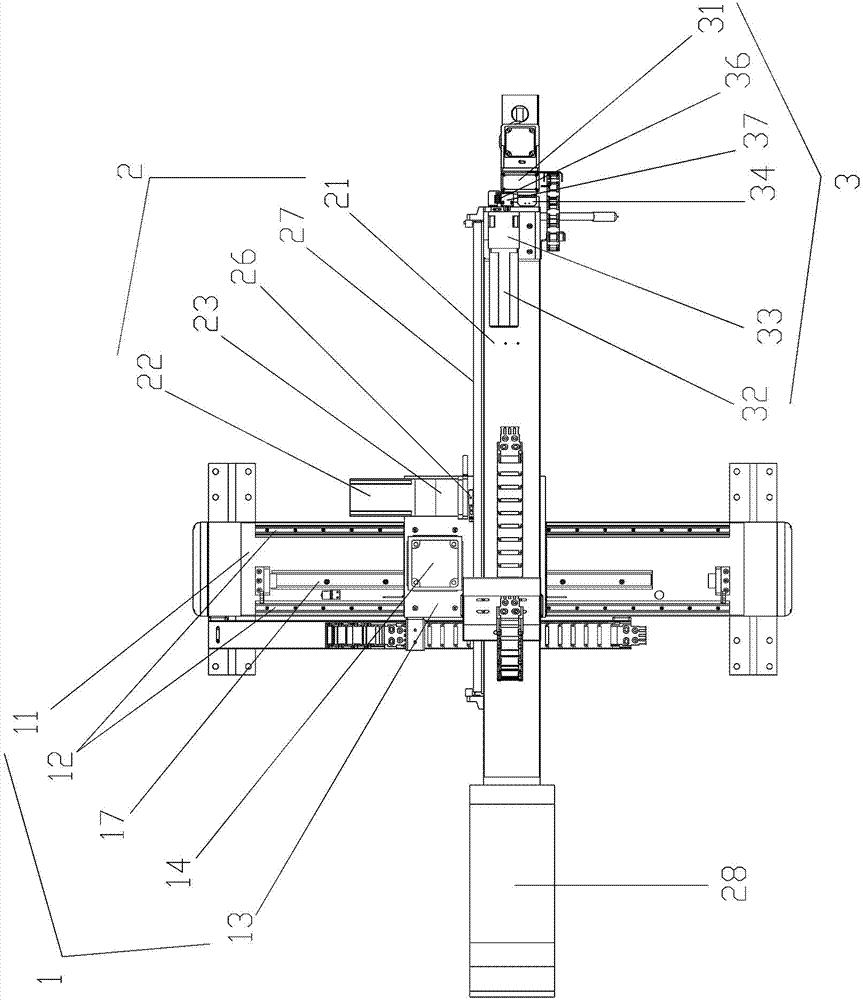
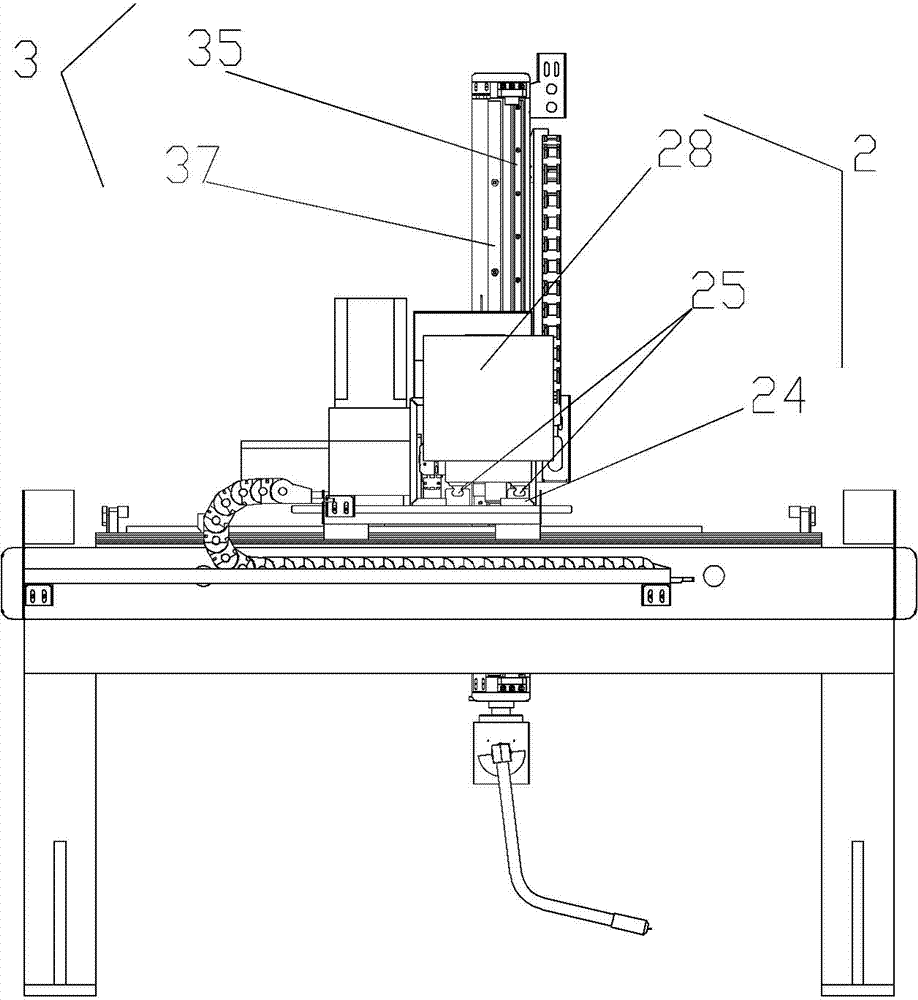
[0035] Such as Figure 1-Figure 4 The illustrated embodiment of the present invention is a welding robot based on a Cartesian coordinate system. The robot includes: an X-axis base mechanism 1 includes: a base 11; two first guide rails 12: mounted on the base 11; X Shaft sliding table 13: installed on the first guide rail 12; first motor 14: installed on the X-axis sliding table 13, the first motor is controlled by the control system; the first planetary gear reducer 15: cooperates with the first motor 14 Installed on the X-axis sliding table, the output shaft extends downwards outside the X-axis sliding table; the first gear 16: arranged under the X-axis sliding table and fixedly connected to the first planetary gear reducer 15; the first rack 17 : Installed on the base 11, meshed with the first gear 16 and driven by it; among them, the first motor 14 drives the first...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More