

Flexible-hinge parallel-connection robot control device based on contact-type sensor
A technology of touch sensors and flexible hinges, which is applied in the direction of program-controlled manipulators, manipulators, manufacturing tools, etc., can solve the problems of limited practicality, high cost, and complicated data processing process, and achieve low equipment cost, simple use method, and information Handling Powerful Effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be further described below in conjunction with the accompanying drawings and implementation examples.
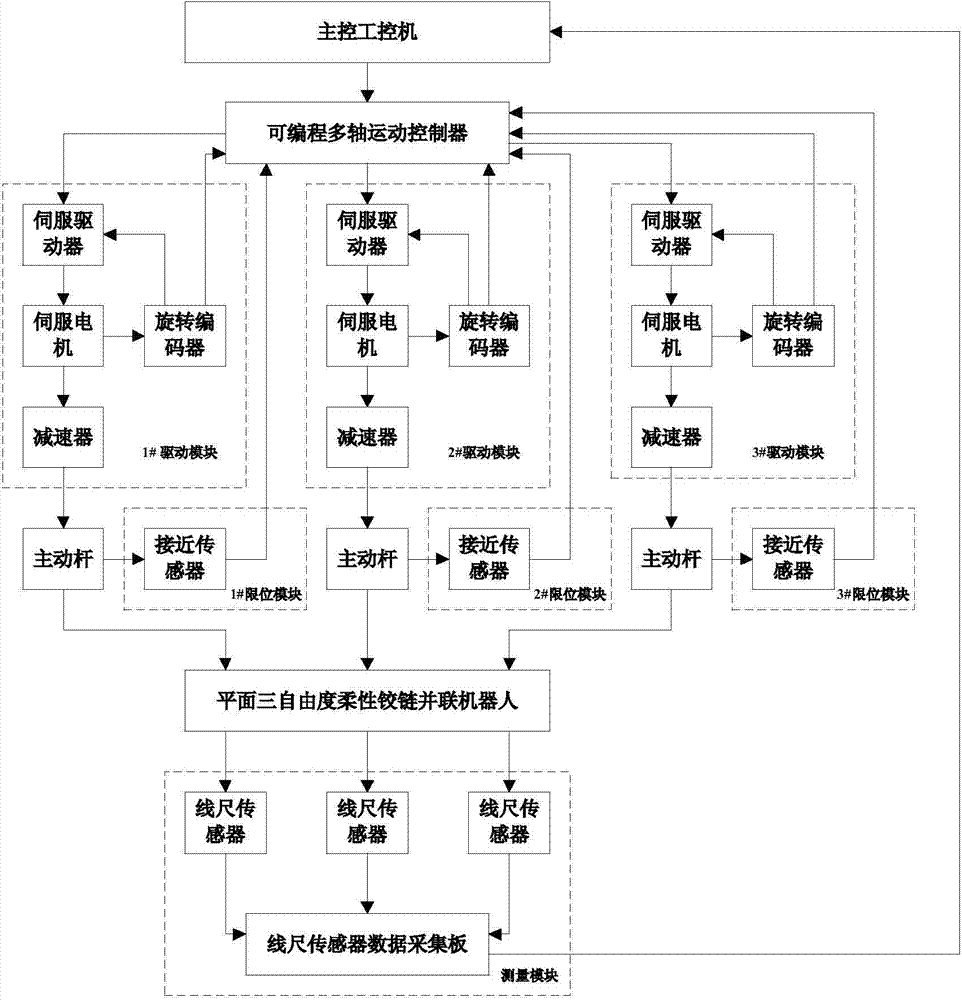
[0017] like figure 1 Shown is a schematic diagram of a planar three-degree-of-freedom flexible hinge parallel robot control device. The entire device includes a planar three-degree-of-freedom flexible hinge parallel robot, a main control industrial computer, a drive module, a limit module and a measurement module; the drive module is composed of a servo controller, It consists of servo motor, rotary encoder and reducer; the limit module consists of three sets of zero-return proximity sensors and three sets of limit proximity sensors; the measurement module consists of a linear scale sensor and a linear scale sensor data acquisition board; the main control industrial computer and The programmable multi-axis motion controller is connected, the programmable multi-axis motion controller is connected with the drive module and the limit module, th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More