

Implementation method of a zero-return control system for a dispensing robot
A dispensing robot and control system technology, applied in general control systems, control/regulation systems, computer control, etc., can solve problems such as collision and damage of dispensing robots, and achieve the effects of solving motion interference, shortening return time, and improving work efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention provides a zero-return control system of a dispensing robot and its implementation method. In order to make the purpose, technical solution and effect of the present invention clearer and clearer, the present invention will be further described in detail below with reference to the accompanying drawings and examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
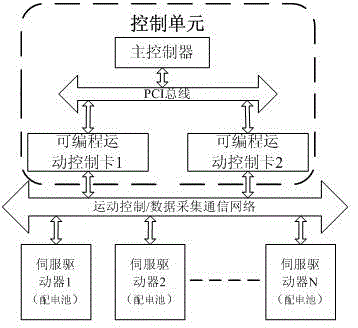
[0030] see figure 2 , which is the zero return control system of the dispensing robot of the present invention, as shown in the figure, it includes: a main controller, several programmable motion control cards (in this embodiment, the number of programmable motion control cards There are two: programmable motion control card 1 and programmable motion control card 2), servo drive and relay terminal board; wherein, the main controller communicates with the programmable motion control ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More