

Hand function rehabilitation robot human-computer interaction control system based on embedded android mobile terminal and FPGA
A rehabilitation robot and mobile terminal technology, applied in the general control system, control/regulation system, computer control, etc., can solve the problems of low human-computer interaction performance, poor system openness, unfavorable portability, etc., to improve human-computer interaction performance, The effect of increased active engagement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
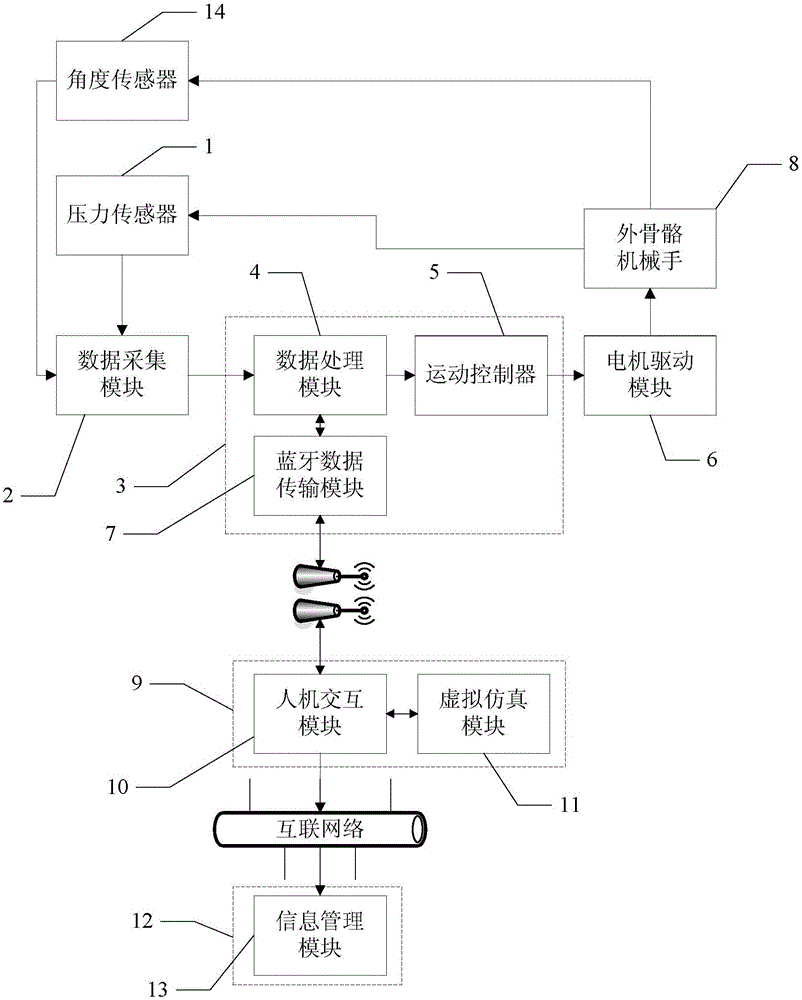
[0058] Specific implementation mode 1. Combination figure 1 This specific embodiment will be described, based on a human-computer interaction control system for hand function rehabilitation robots embedded in an Android mobile terminal and an FPGA, which includes a pressure sensor 1, an angle sensor 14, a data acquisition module 2, an FPGA single-chip system 3, and an Android mobile terminal 9 , motor drive module 6 and exoskeleton manipulator 8,
[0059] The pressure sensor 1 is used to collect the pressure information applied by the fingertips of the human fingertips to the fingertips of the exoskeleton manipulator 8,
[0060] The fingertip pressure acquisition signal output end of the pressure sensor 1 is connected to the fingertip pressure data acquisition signal input end of the data acquisition module 2,
[0061] The angle sensor 14 is used to collect the rotation angle information of the exoskeleton manipulator 8,
[0062] The rotation angle acquisition signal output ...
specific Embodiment approach 2
[0072] Specific embodiment 2. Combination figure 1 This specific embodiment is described. The difference between this specific embodiment and the human-computer interaction control system for hand function rehabilitation robot based on embedded Android mobile terminal and FPGA described in specific embodiment 1 is that the FPGA single-chip system 3 includes data processing. Module 4, motion controller 5 and Bluetooth data transmission module 7,
[0073] The data processing module 4 is used for receiving the information of the pressure exerted by the fingertips of the exoskeleton manipulator 8 and the rotation angle information of the exoskeleton manipulator 8 sent by the data acquisition module 2, and is also used for data interaction with the Bluetooth data transmission module 7, Also used to send this data to the motion controller 5,
[0074] The motion controller 5 is used to receive the motion mode information sent by the data processing module 4, and is also used to call...
specific Embodiment approach 3
[0078] Embodiment 3. The difference between this embodiment and the man-machine interaction control system for hand function rehabilitation robot based on embedded Android mobile terminal and FPGA described in Embodiment 2 is that the data processing module 4 includes a pressure information receiving module , rotation angle information receiving module, system start module, system stop module, rotation angle information preset receiving module, rehabilitation exercise speed preset receiving module, pressure value preset module, pressure value comparison module, rotation angle information comparison module, exercise mode generation module and rotation pattern generation module,
[0079] The pressure information receiving module is used to receive the pressure information applied by the fingertips of the human body to the fingertips of the exoskeleton manipulator 8 sent by the data acquisition module 2, and send the pressure information to the Bluetooth data transmission module 7...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More