

A Robust Filtering Method Against Parameter Uncertainty and Observation Loss
A technology of parameter uncertainty and robust filtering, applied in the field of robust filtering, can solve problems such as large estimation error, packet loss of main inertial navigation information, estimation divergence, etc., and achieve the effect of good robustness and wide application background
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0018] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
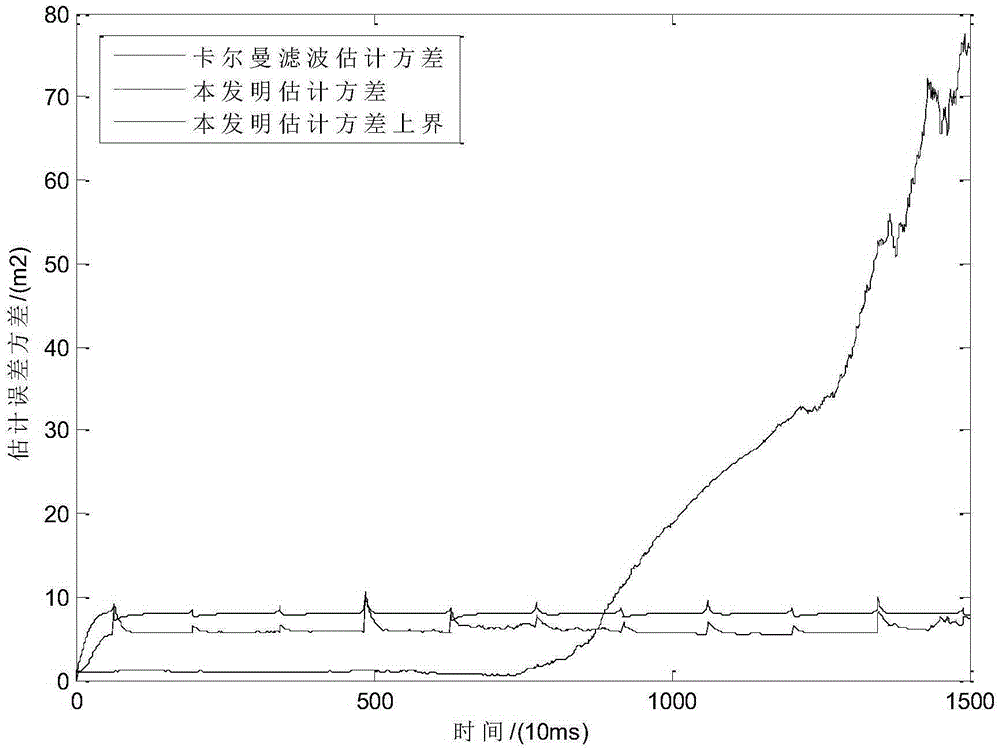
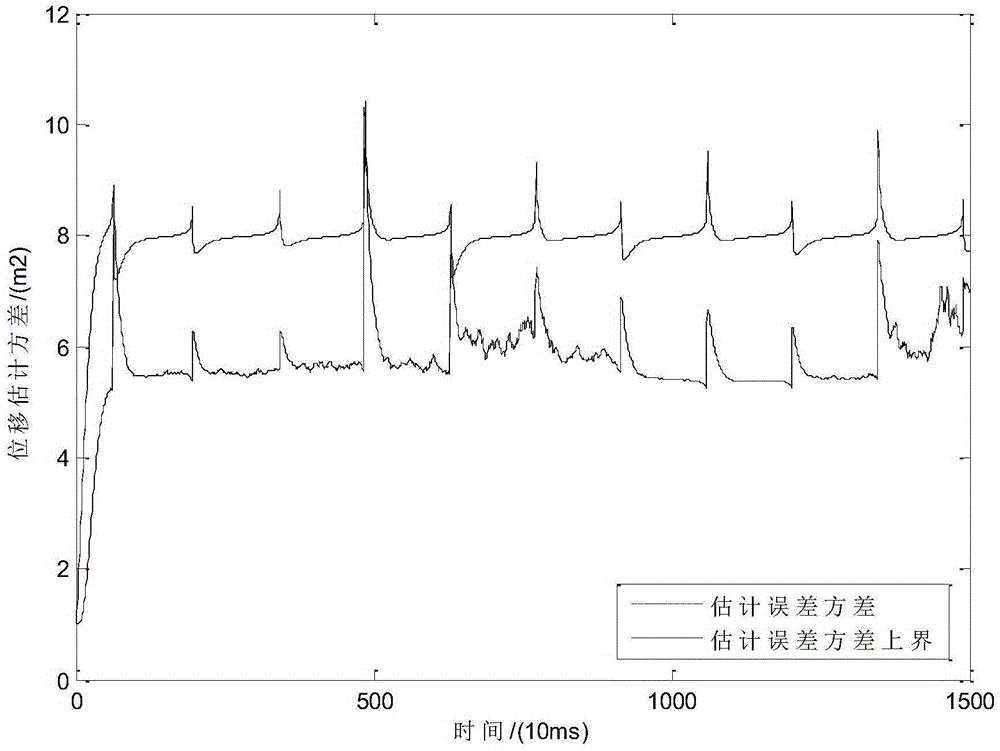
[0019] The basic principle of the present invention is: when there is uncertainty in the system, it is no longer possible to obtain accurate estimation error covariance, instead, for the situation where the parameter uncertainty norm is bounded, the method of linear matrix inequality can be used Find an upper bound on the estimated error covariance. The upper bound is a function of the filter parameters, and the upper bound of the estimated error covariance is minimized by designing the filter parameters. The present invention is also applicable when there is observation loss in the system. In this embodiment, a simple speed-position system is considered, the initial position and speed of the moving body are 1m and 1m / s respectively, artificial interference is imposed on the maneuvering of the moving body, the position of the moving body is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More