Modularized sub-action multi-legged robot motion controller and control method thereof
A multi-legged robot and robot motion technology, which is applied in the field of modular split-action multi-legged robot motion controller and its control, can solve the problems of control system scheme without backup, limitation of robot change and expansion ability, complex control algorithm, etc. , to achieve the effect of easy expansion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0039] Mainly explain the straight forward function of split quadruped robot.
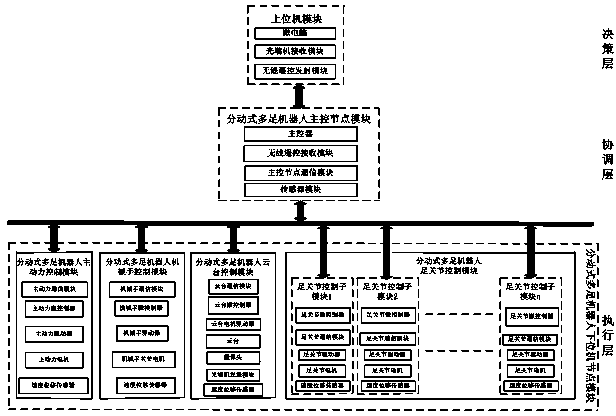
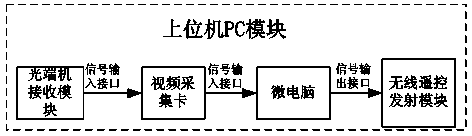
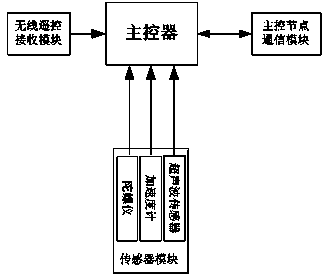
[0040] A modular split quadruped robot motion controller includes a host computer module, a split quadruped robot master control node module, and a split quadruped robot lower computer node module. The upper computer module is connected to the main control node module of the split quadruped robot through the USB-CAN converter and the shielded twisted pair, and the main control node module of the split quadruped robot is connected to the lower part of the split quadruped robot through the shielded twisted pair The machine node module is connected. The upper computer module includes a microcomputer, a digital video optical transceiver receiving end, and a wireless remote control transmitter module (TK-DSM542_T); the digital video optical transceiver is connected to the microcomputer through the PCI slot, and the TK-DSM542_T is connected to the microcomputer through the RS232 interface; The control n...
Embodiment 2
[0047] The turning function of the split hexapod robot is mainly explained.
[0048] A modular split-type hexapod robot motion controller includes a host computer module, a split-type hexapod robot master control node module, and a split-type hexapod robot lower-position node module. The upper computer module is connected to the main control node module of the split hexapod robot through the USB-CAN converter and the shielded twisted pair, and the main control node module of the split hexapod robot is connected to the lower part of the split hexapod robot through the shielded twisted pair The machine node module is connected. The upper computer module includes a microcomputer, digital video optical transceiver receiving end, wireless remote control transmitter module (TK-DHM544_T); the digital video optical transceiver receiving end is connected to the microcomputer through a PCI slot, and the wireless remote control transmitting module (TK-DHM544_T) is passed through a 232-48...
Embodiment 3
[0056] Mainly explain the obstacle avoidance function of the split-motion eight-legged robot.
[0057] A modular split-type eight-legged robot motion controller includes a host computer module, a split-type eight-legged robot master control node module, and a split-type eight-legged robot lower-position node module. The upper computer module is connected to the main control node module of the split-type eight-legged robot through the USB-CAN converter and the shielded twisted pair, and the main control node module of the split-type eight-legged robot is connected to the lower part of the split-type eight-legged robot through the shielded twisted pair The machine node module is connected. The upper computer module includes a microcomputer, a digital video optical transceiver receiver, and a wireless remote control transmitter module (RFC-33A_T); the digital video optical transceiver receiver is connected to the microcomputer through a PCI slot, and the split eight-legged robot ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More