

Six-shaft joint mechanical hand
A technology of manipulators and joints, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of high cost of six-axis joint manipulators, unsuitable for small and medium-sized enterprises, etc., to reduce after-sales service costs and easy to operate Understand and apply to a wide range of effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
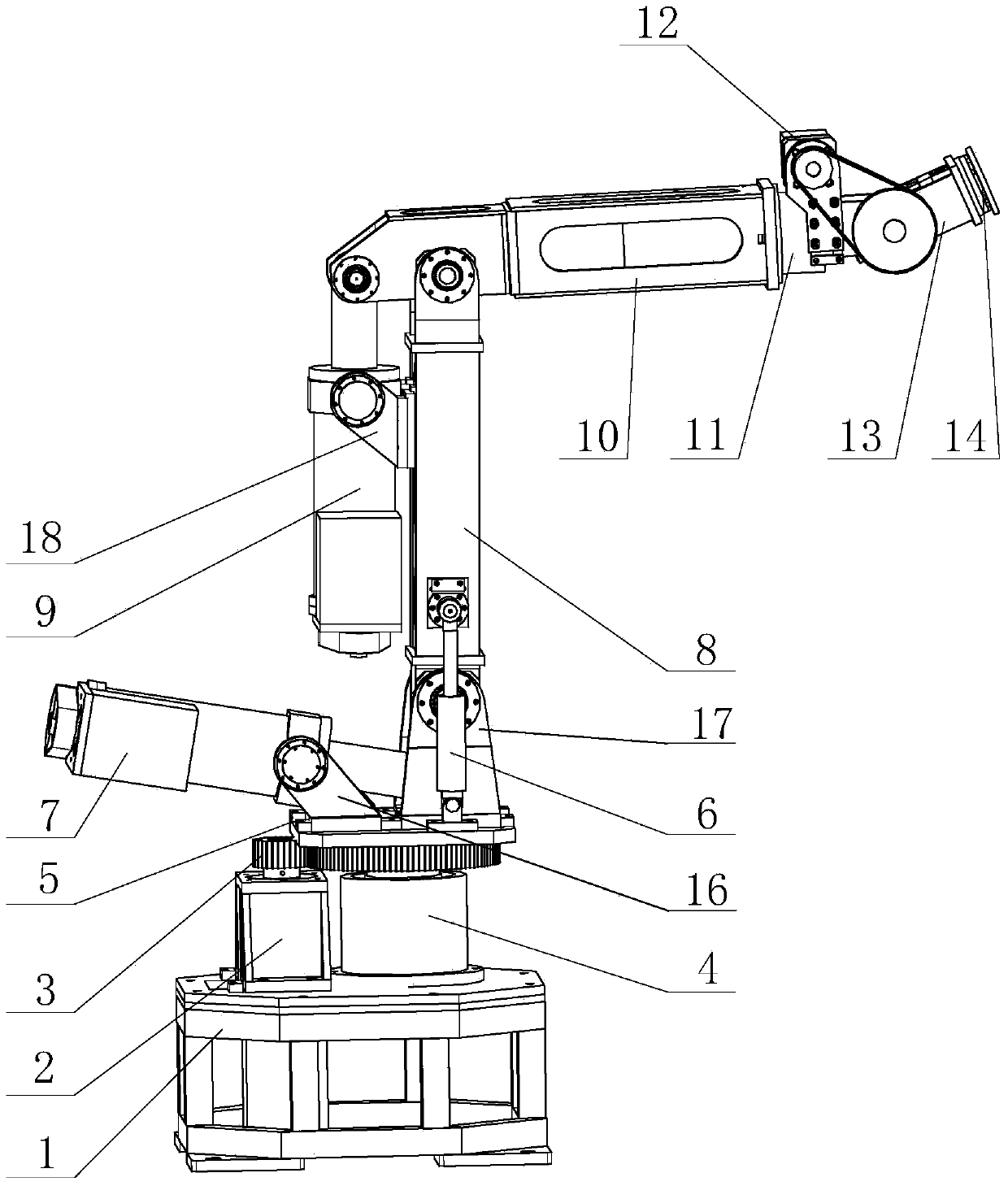
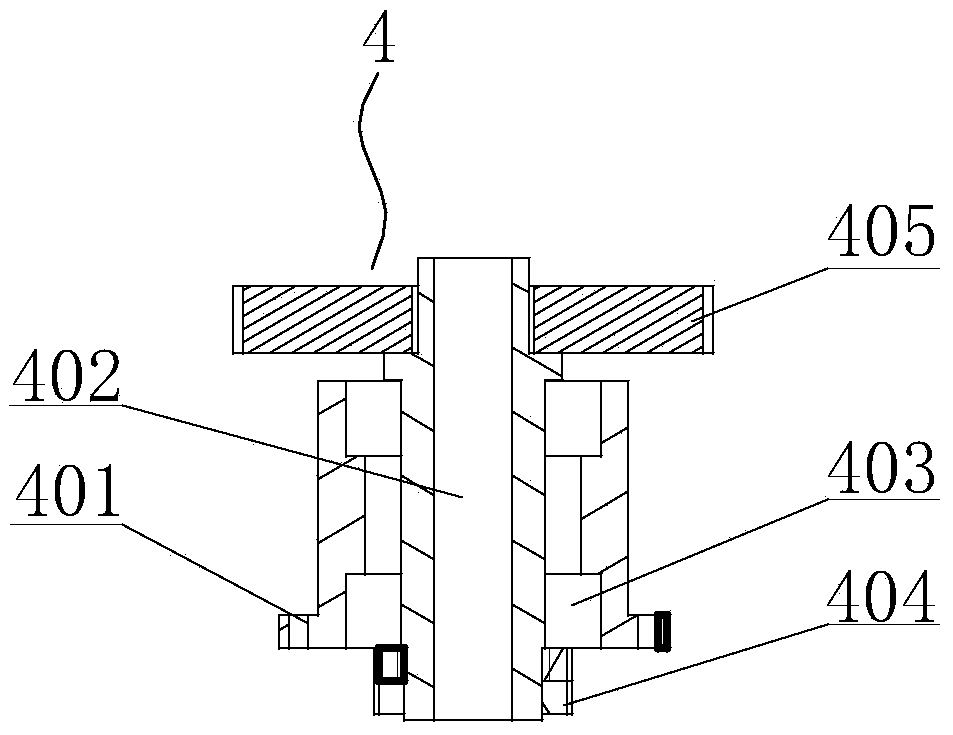
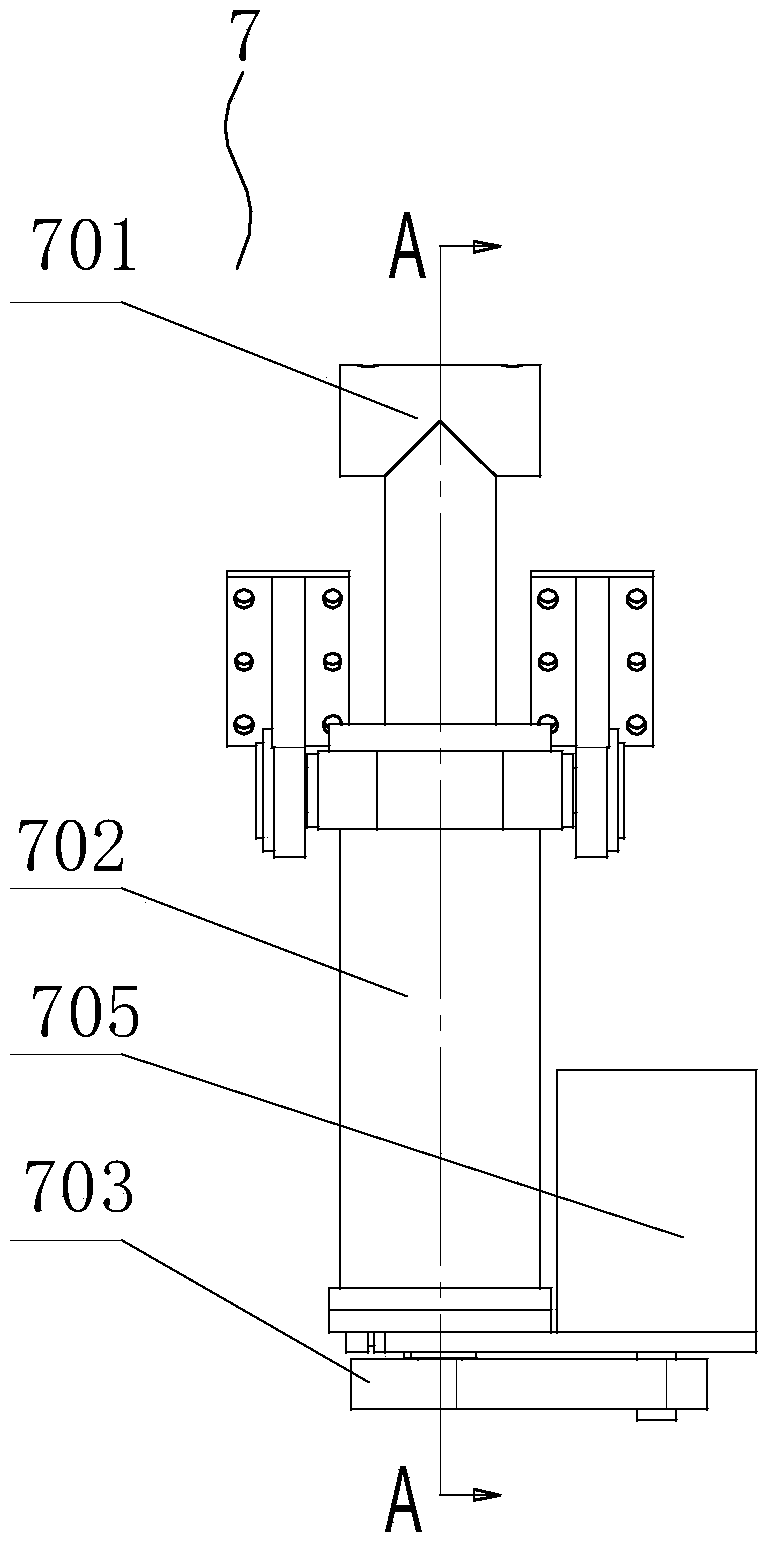
[0063] figure 1 Disclosed in is a six-axis articulated robot, including a robot body and a control system 21, the robot body and the control system are connected through a data line, and the robot body includes a base 1, an I-axis servo motor and a reducer 2. Ⅰ-axis rotating shaft 4, Ⅱ-axis base 5, lower arm servo cylinder 7, lower arm 8, upper arm servo cylinder 9, upper arm 10, Ⅳ-axis rotating shaft 11, Ⅴ-axis servo motor and its reducer 12, Ⅴ-axis rotation Shaft 13, Ⅵ-axis rotating shaft 14, Ⅵ-axis servo motor and its reducer 15;
[0064] The I-axis servo motor and its reducer 2, and the I-axis rotating shaft 4 are respectively fixed on the base 1, and the output shaft of the I-axis servo motor and its reducer 2 is connected to the I-axis rotating shaft 4 through the transmission gear I3, The top of the I-axis rotating shaft 4 is fixedly connected to the II-axis base 5, the lower arm servo cylinder 7 is hinged on the support base A16, the lower arm 8 is hinged on the suppo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More